目前我测得的OpenIMU300的轴方向如图1所示 这是一个左手坐标系,且Z轴的角度方向与x、y轴相反。我准备用这个IMU结合GPS信息进行进行紧耦合解算,而一般测绘用的IMU都是右手坐标系,且角度方向应是一致的,如我翻看adis16488的说明书给出的是这样的
这是一个左手坐标系,且Z轴的角度方向与x、y轴相反。我准备用这个IMU结合GPS信息进行进行紧耦合解算,而一般测绘用的IMU都是右手坐标系,且角度方向应是一致的,如我翻看adis16488的说明书给出的是这样的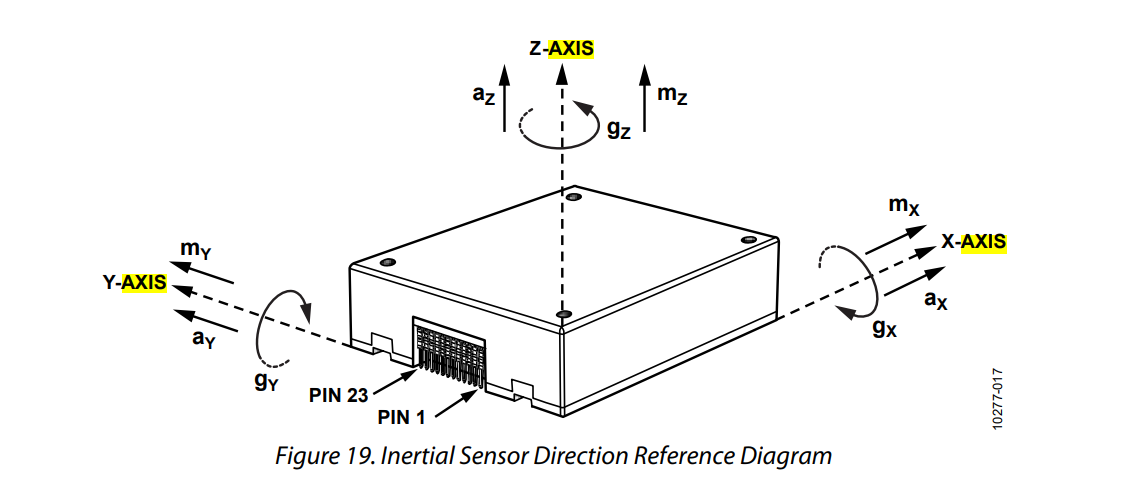
怎样将Openimu300的数据进行转换,使其可导入到Inertial Explorer 软件中进行解算?该软件中所有关于IMU的定义均是右手坐标系,如下图所示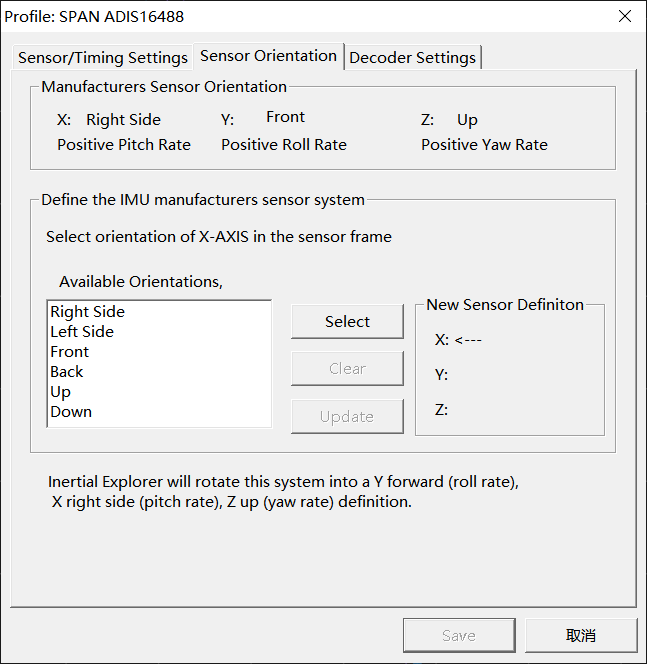
其软件文档中关于IMU数据的描述如下图所示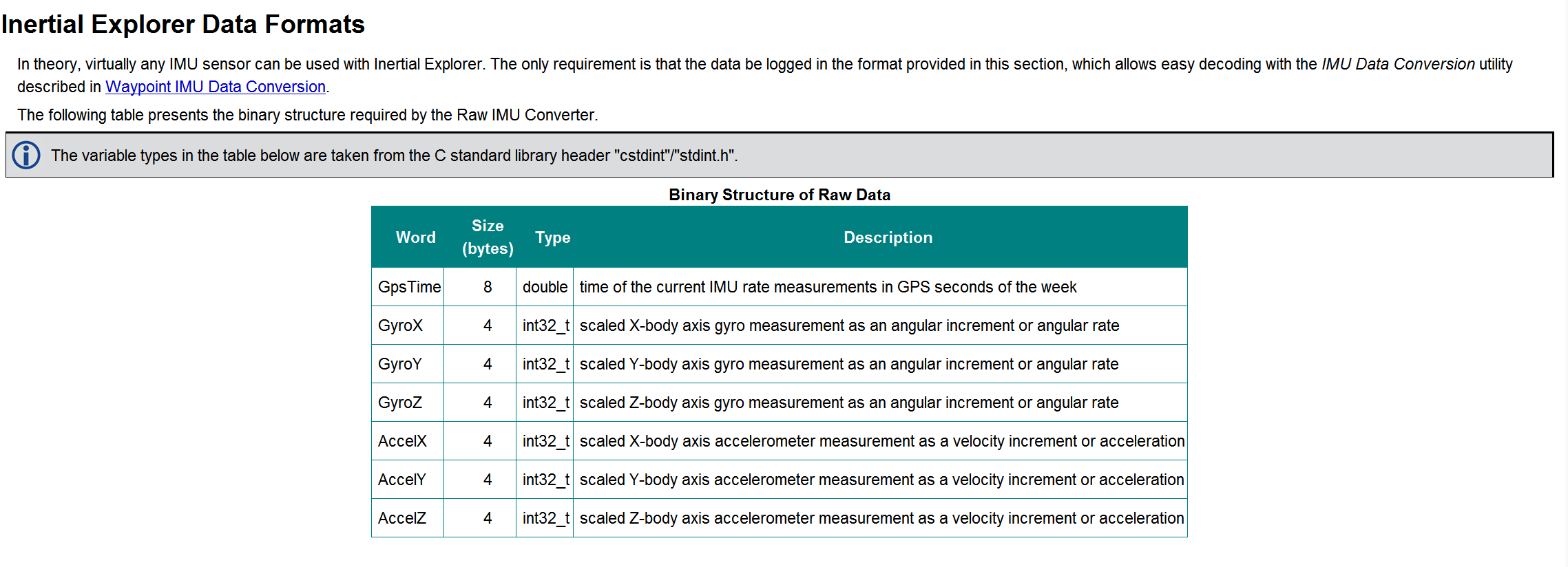
如果我想将Openimu的观测数据导入Inertial Explorer软件中与GNSS数据进行紧耦合解算,是否需要将原始数据中的zAccel(g)一列的数据乘以-1即可,即可使原来的z轴指向正下方,使其变为右手坐标系,且三个角速度的轴方向均成为逆时针为正的方向(在图1 中,z轴的方向是顺时针为正)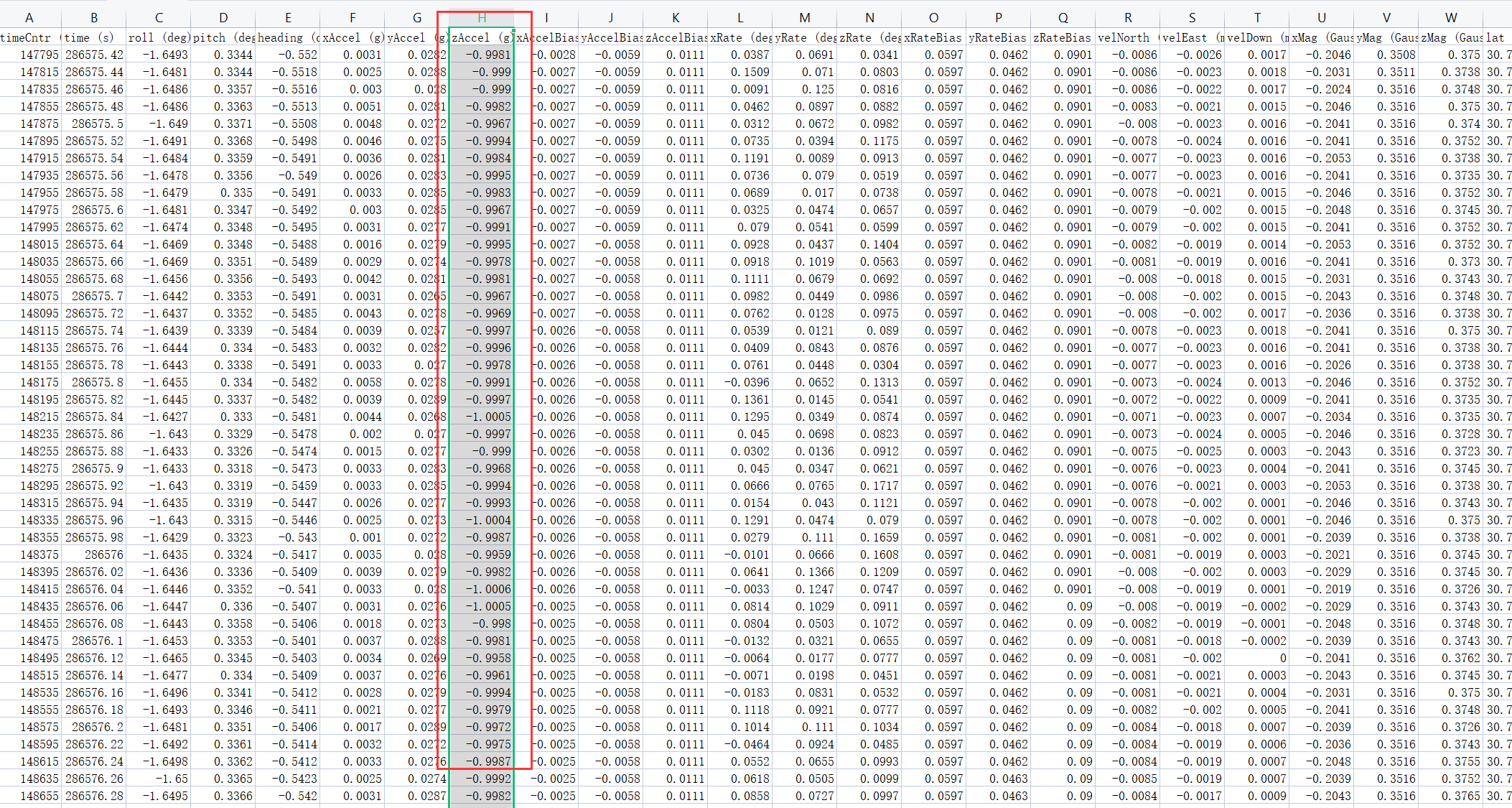
第一次使用IMU,如有一些说明不清或用语不当的地方,请见谅
怎样将OpenIMU300的六轴数据导入Inertial Explorer?
