I did it again and this time it worked. Very cool! It is about 5x slower than flashing with ST-LINK or VS Code though.

zhihengcao
@zhihengcao
0
Reputation
27
Posts
1634
Profile views
1
Followers
0
Following
Posts made by zhihengcao
RE: Please fix firmware update online button
posted in OpenRTK •
OpenRTK Android app does not find EVK / Bluetooth connection does not work
posted in OpenRTK •
I followed the instruction on https://openrtk.readthedocs.io/en/latest/useOpenRTK/Go-Mobile.html
In the step
"Open the “OpenRTK” Andorid App, as shown by the picture below, go to the “Connect” tab and click the “search” icon (right bottom) to search for your device."
There phone does not find the EVK.
I tried flashing to the factory original firmware, it cannot be found. The android phone has Bluetooth turned on. I can find other previously used BT devices.
RE: Where is openrtk_data_parse?
posted in OpenRTK •
Thank you, I have been reading this example and it helps me understand the system a lot.
The RPK/INS correction is your proprietary and done inside a closed source library (.a file). This is totally fine, but the example firmware only demonstrates correction in real time assuming Base RTCM data stream from UART or BT or HTTP.
I am looking to implement Post Processing, the firmware stores the IMU and GNSS raw data into on-board memory, then receive archived Base RTCM data stored in the past, to run your proprietary library. Can you tell me if this is something that can be achieved with your proprietary library without limitations? Does your proprietary library have some restrictions, like it has to be run based on realtime/live data? Does it have restrictions it has to be run in combination with some hardware & firmware? In other words, do you limit your proprietary library to run only on the OpenRTK module, or can it be ported run on any ARM processor?
RE: Is Python Driver needed for RTK to function at all?
posted in OpenRTK •
No RED LED:
http://192.168.137.110/runStatus.shtml shows:
Station Mode:
NTRIP-CLIENT
Station Status:
NTRIP-CLIENT & CONNECTED
Red LED flashing:
http://192.168.137.110/runStatus.shtml shows:
Station Mode:
OPENARC-CLIENT
Station Status:
RTCM AVAILABLE
RE: Is Python Driver needed for RTK to function at all?
posted in OpenRTK •
Correction! It appears the "NTRIP" mode configured in firmware does not really work through the Ethernet, the "RED" led only lights up in "OpenArc Client" mode. So there appears to be a bug that makes the NTRIP mode only work through Python Driver, while Openarc client works through the Ethernet without Python Driver. Please fix the bug so NTRIP can also work through the Ethernet without Python driver running.
RE: Is Python Driver needed for RTK to function at all?
posted in OpenRTK •
To answer my own question, the 58.215.20.43 along with username/password is specified in openrtk.json file of settings folder of the Python driver, and it works. The 47.116.1.17 along with another username/password is baked inside the firmware and does not work. So I put the info from openrtk.json via http://192.168.137.110/workCfg.shtml into the firmware, now I see the "RED" LED flash even without Python driver running, as long as the Ethernet cable is plugged into somewhere with Internet access.
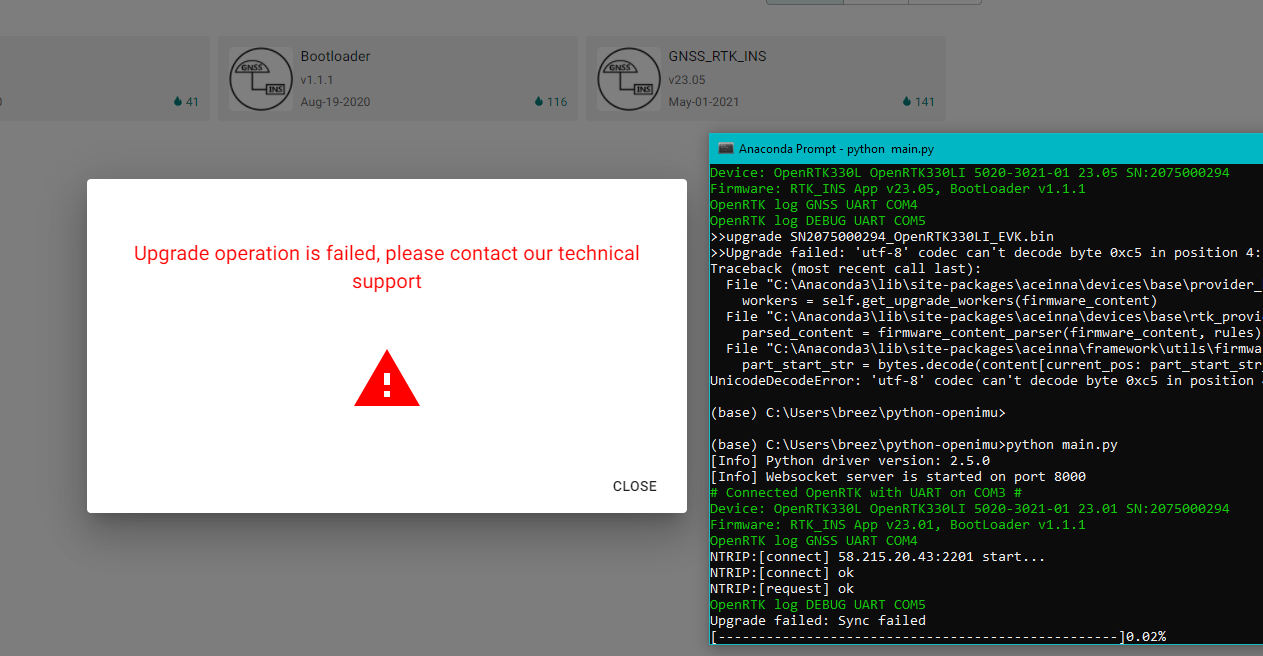
Please fix firmware update online button
posted in OpenRTK •
It seems the "Upgrade" button in developer.aceinna.com for GNSS_RTK_INS always fails and bricks the device until I use ST_LINK to flash the entire device with the backup bin. The slider in the screenshot below never moves past 0.02%.
Is Python Driver needed for RTK to function at all?
posted in OpenRTK •
I noticed that even when Ethernet is connected and has Internet access, the "RED" LED does not light up (indicating no data from NTRIP) unless I start also the Python driver.
Also, the Python driver reporting connecting to "58.215.20.43" regardless of the setting I put in http://192.168.137.110/openarcclientcfg.cgi "Work Config", If I put NTRIP Client mode IP=47.116.1.17 or OpenARC client IP=openarc.aceinna.com (52.183.58.220) the Python driver still connects to 58.215.20.43. Where is this IP address 58.215.20.43 coming from? How can I change it to NTRIP server that is local to my position so the RTK will actually work in my location?
RE: OpenRTK INS Status INACTIVE / INVALID?
posted in OpenRTK •
I plan to write the STM32 firmware that run inside your module, to connect via I2C or SPI to a SD card module to store data.
My application will not have reliable Internet connection during logging, so my goal is to store the "rtcm_rover_xxx.bin" data and IMU "user_xxx.bin" data in the SD card then when Internet becomes available, send these data to our server to perform PPK + INS using something like https://www.eye4software.com/hydromagic/documentation/articles-and-howtos/ppk-surveys/
Please let me know if OpenRTK can be used for this.
RE: Where is openrtk_data_parse?
posted in OpenRTK •
I am reading https://www.eye4software.com/hydromagic/documentation/articles-and-howtos/ppk-surveys/ Can you support this flow to allow OpenRTK to be used this way?