Hello,
I've been running sims online, but have found it faster and easier to script by running locally. I've been working wirh demo_free_integration.py currently.
I've noticed when I run the script 1x locally - the generated kml paths are the same. When I try multiple runs like this:
sim.run(10)
I get results, but they are all duplicate, and very different than the online sim (generally much better position), when I use duplicate input motion params.
I'm using this file, but changed the data to: motion_def-long_drive.csv and line 74 changed to run 10x.
https://github.com/Aceinna/gnss-ins-sim/blob/master/demo_free_integration.py
When I run this online (5x), I get these results (RED) vs ref (GREEN) path:
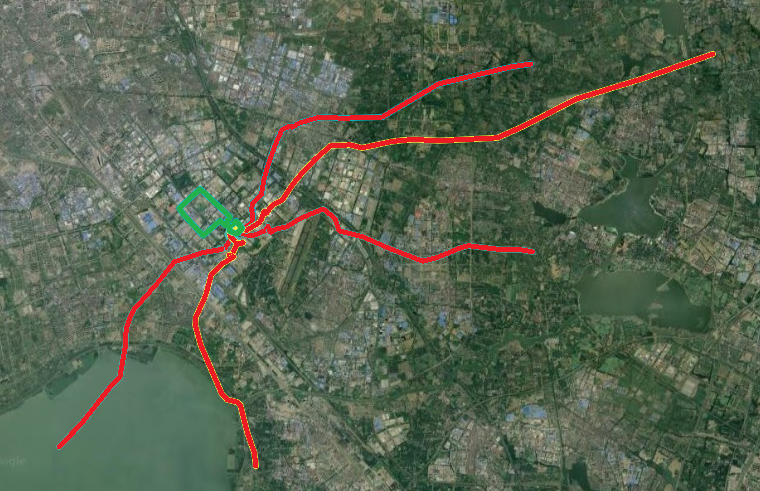
When I run local (10x), I get these results:

Difficult to see, but reference path is same, results are MUCH better, and all 10 runs are identical.
Here are my sensor settings:
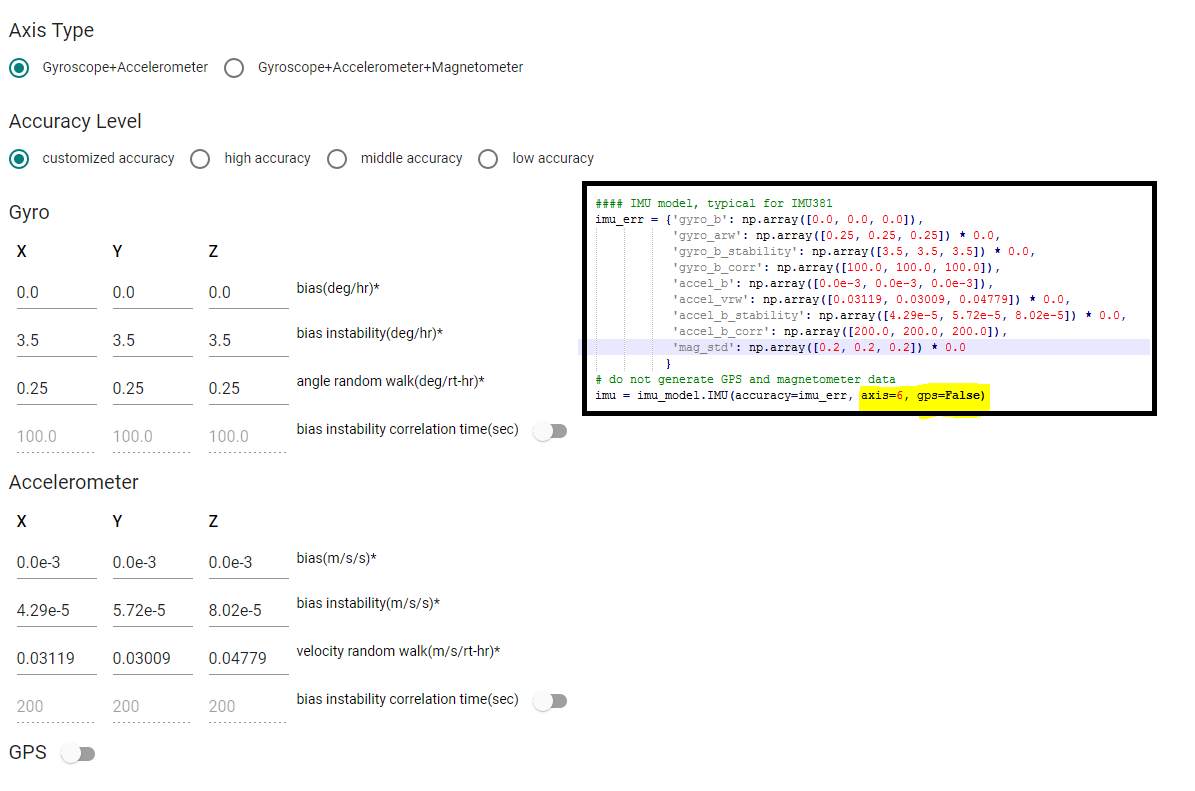
And...
I once I had all this typed up, I found the error.
looks like I had copy and pasted a bit from demo_free_integration_long_time.py that had some sneaky changes:
#### IMU model, typical for IMU381
imu_err = {'gyro_b': np.array([0.0, 0.0, 0.0]),
'gyro_arw': np.array([0.25, 0.25, 0.25]) * 0.0,
'gyro_b_stability': np.array([3.5, 3.5, 3.5]) * 0.0,
'gyro_b_corr': np.array([100.0, 100.0, 100.0]),
'accel_b': np.array([0.0e-3, 0.0e-3, 0.0e-3]),
'accel_vrw': np.array([0.03119, 0.03009, 0.04779]) * 0.0,
'accel_b_stability': np.array([4.29e-5, 5.72e-5, 8.02e-5]) * 0.0,
'accel_b_corr': np.array([200.0, 200.0, 200.0]),
'mag_std': np.array([0.2, 0.2, 0.2]) * 0.0
}
Watch those * 0.0's !! looks like someone added a tolerance fudger to the base errors and nulled them for that demo - this seems to have the effect of using a perfect gyro with some accel errors only.
With that fixed everything run as expected...
I'll leave this here for anyone that had the same issue.
")