Or ist it possible to record data dependent of a TTL-trigger signal?
Posts made by Andreas Siebert
RE: How to synchronize OpenIMU300ZI with external accelerometer?
posted in The OpenIMU Family •
How to synchronize OpenIMU300ZI with external accelerometer?
posted in The OpenIMU Family •
Hello,
according to the docs it is just described how to sync IMU with 1PPS Signal from GNSS.
I have an external accelerometer and want to use the synchronization input to syn the IMU with the sensor.
Which files do I have to configure?
Kind Regards
RE: Rate and Acceleration Bias State-Transition Models
posted in The OpenIMU Family •
Has noboy an idea? I just need a reference.
Rate and Acceleration Bias State-Transition Models
posted in The OpenIMU Family •
Hello,
the proposed EKF in the Aceinna Online Manuel uses in the state-transition section for the rate and acceleration bias following model to calculate the standard deviation of the drift rate of the gyroscope:
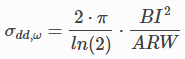
It is just said that this equation comes from an empirical study. Are there any paper/links available to this study where I can find this relation between BI and ARW respectively to the gyro drift rate?
Thanks in advance.
Kind Regards
Andreas
OpenIMU300ZI - G-Sensitivity of gyro (shock-resistance)
posted in The OpenIMU Family •
Dear all,
Background:
In my application there are sometimes harsh dynamic situations where the linear acceleration is for short terms out of the dynamic range of the used accelerometer (for instance car crash). Using an adaptive gain
I ensure that the accelerometer measurements are weighted less in this situation.
Problem:
In harsh g-environments the g-sensitivity of the gyroscope becomes more relevant.
According to the datasheet of the OpenIMU300ZI I cannot find any specifications about the g-sensitivity of the gyroscope.
Do you have any idea about the linear g-sensitivity of the gyro or how I can get them in experiments?
Kind Regards
Andreas