Thanks for your input but hardware was fine.
I now could fix the problem by rewriting the SPI+DMA framework: There was some bug where the RX handler wouldn't get called correctly.
0
Reputation
6
Posts
250
Profile views
0
Followers
0
Following
Posts made by thomas987
RE: OpenIMU330BI SPI doesn't work
posted in The OpenIMU Family •
RE: OpenIMU330BI SPI doesn't work
posted in The OpenIMU Family •
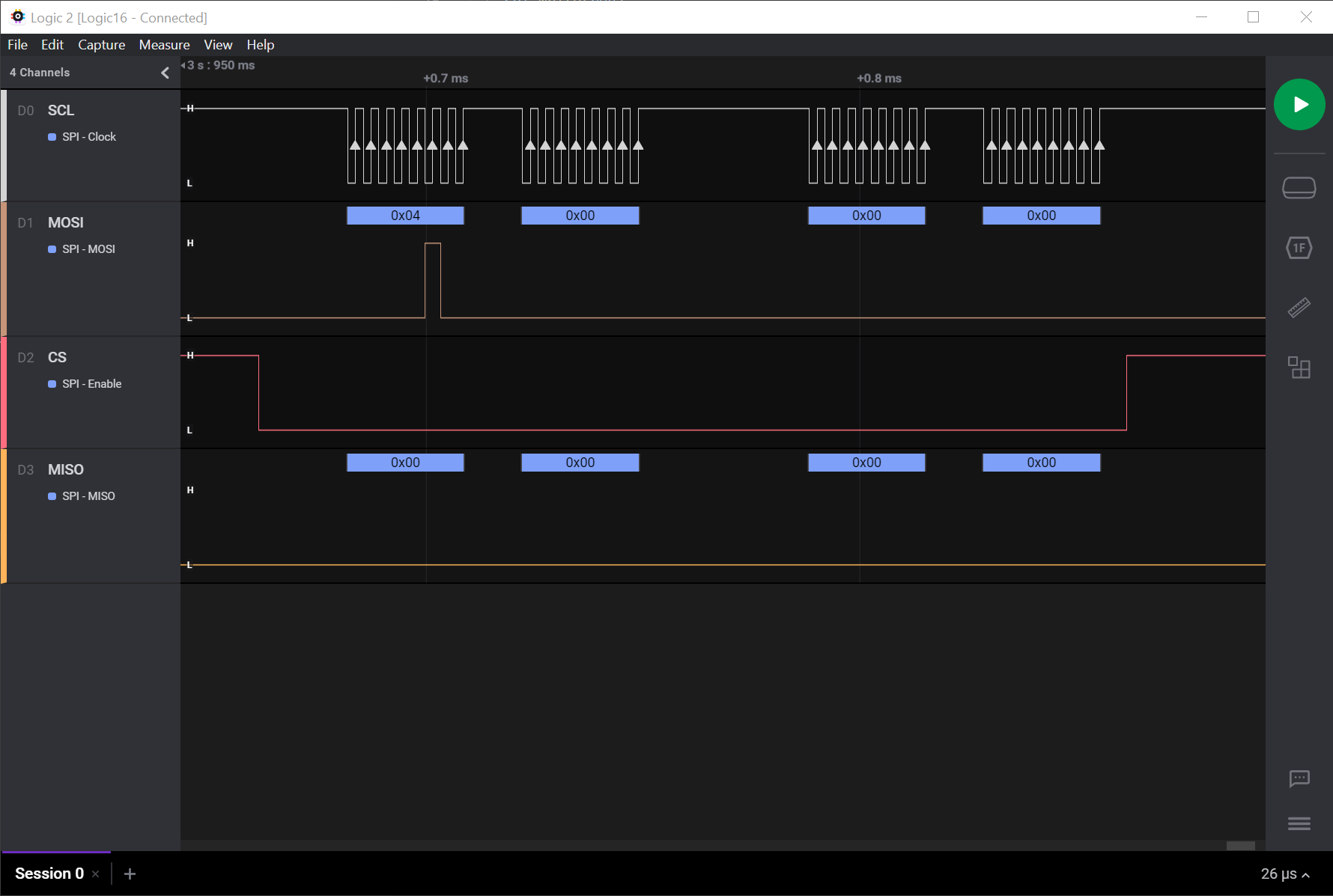
Hi, i already updated to FW2.1, changed SPI communication to 16bit and powering on the IMU after the SPI readout, but i still get no response at all. (at P1 all jumpers are disconnected)
OpenIMU330BI SPI doesn't work
posted in The OpenIMU Family •
Hi again,
now I tried a lot to and it still doesn't work. I'm running the preinstalled OpenIMU "IMU" application (and also tried it with installing the online available bin).
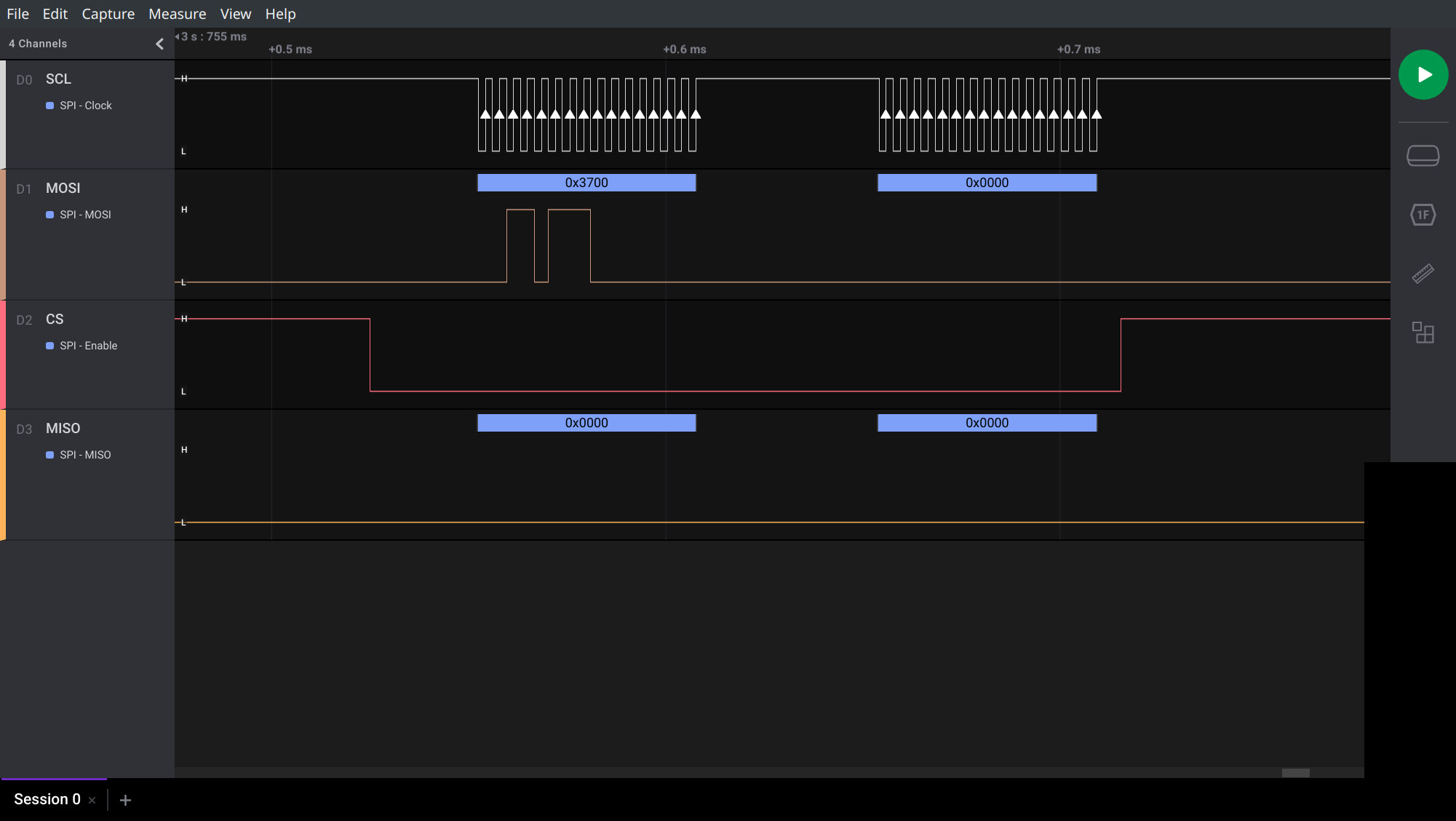
I removed the Jumpers from P1 to enable SPI mode but the IMU simply doesn't answer.
Also I tried different registers (hw version, software version, etc.) and SPI frequencies (from 100kHz to 1MHz) but there's no reply anyway.
When i fit the jumpers the online-webserver connection works fine.
Do you have any idea what could be wrong here?
Best Regards
Thomas
RE: OpenIMU330 Accelerometer & Gyro timestamps
posted in The OpenIMU Family •
Thanks a lot for sharing this information!
RE: OpenIMU330 Accelerometer & Gyro timestamps
posted in The OpenIMU Family •
do you have any idea how much latency that introduces and how accurate the timestamps (including the whole chain) are?
OpenIMU330 Accelerometer & Gyro timestamps
posted in The OpenIMU Family •
Hi,
is it possible to get (accurate) timestamps of the accelerometer/gyrometer measurements?
for now the IMU app runs in a loop and only collects+filters/applies calibration to data but I couldn't find any IMU timestamp.
some IMUs offer interrupt lines which may be used to timestamp them (using input capture timers) or have timestamps attached to their measurements -- is it possible to get any of these working with OpenIMU? (at least µs accuracy would be good)
Best Regards
Thomas