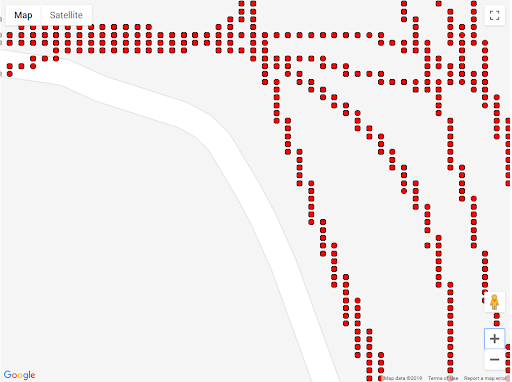
I recently set up an INS system using the openIMU300za and upon initial testing noticed the GPS values appear quantized to fixed ~1.5 meter increments.
Is this an expected result of an algorithm running on the unit and something I can turn off?
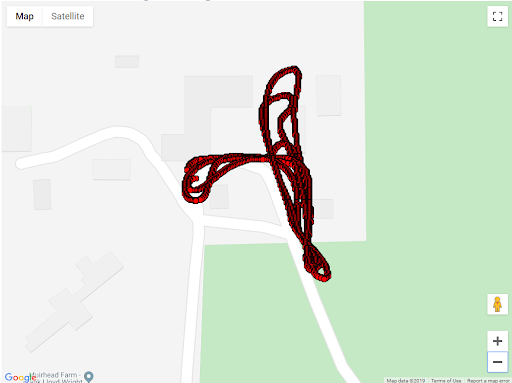
Zoomed in...