Hello,
I'm developing a prototype that requires IMU. Nothing special, just need some basic readings of pitch, yaw and roll which it looks like the OpenIMU300RI should be capable of out of the box with the preinstalled IMU application. I've made up a little packet formatter on my end device that is transmitting what looks like a successful ping packet over RS232.
The hardware setup for the purpose of this test is as below
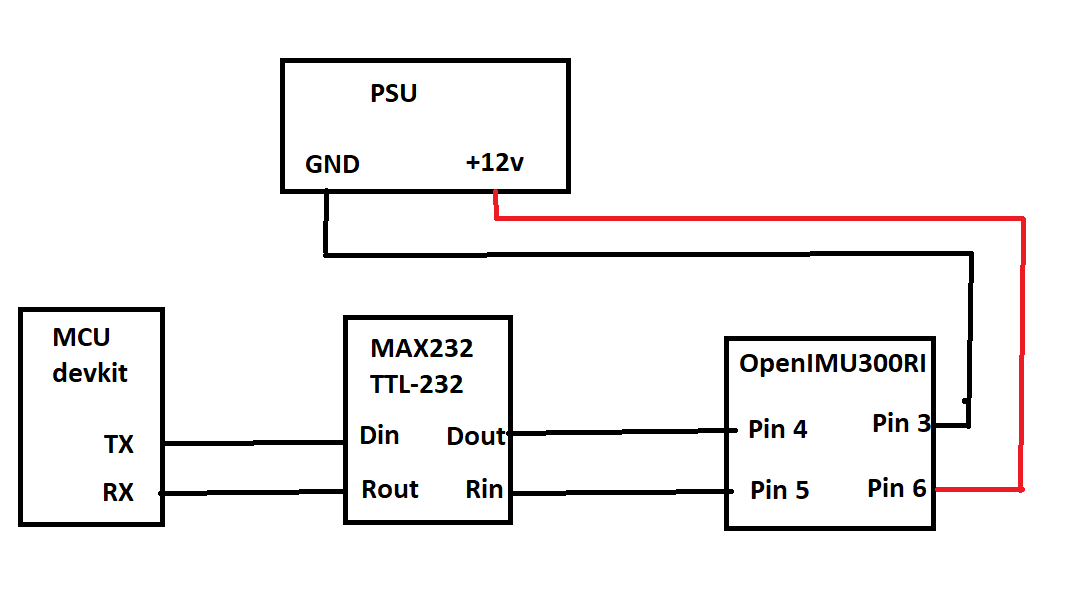
The Facts
1. The PSU is supplying 25-30 milliamps, consistent with data I've seen
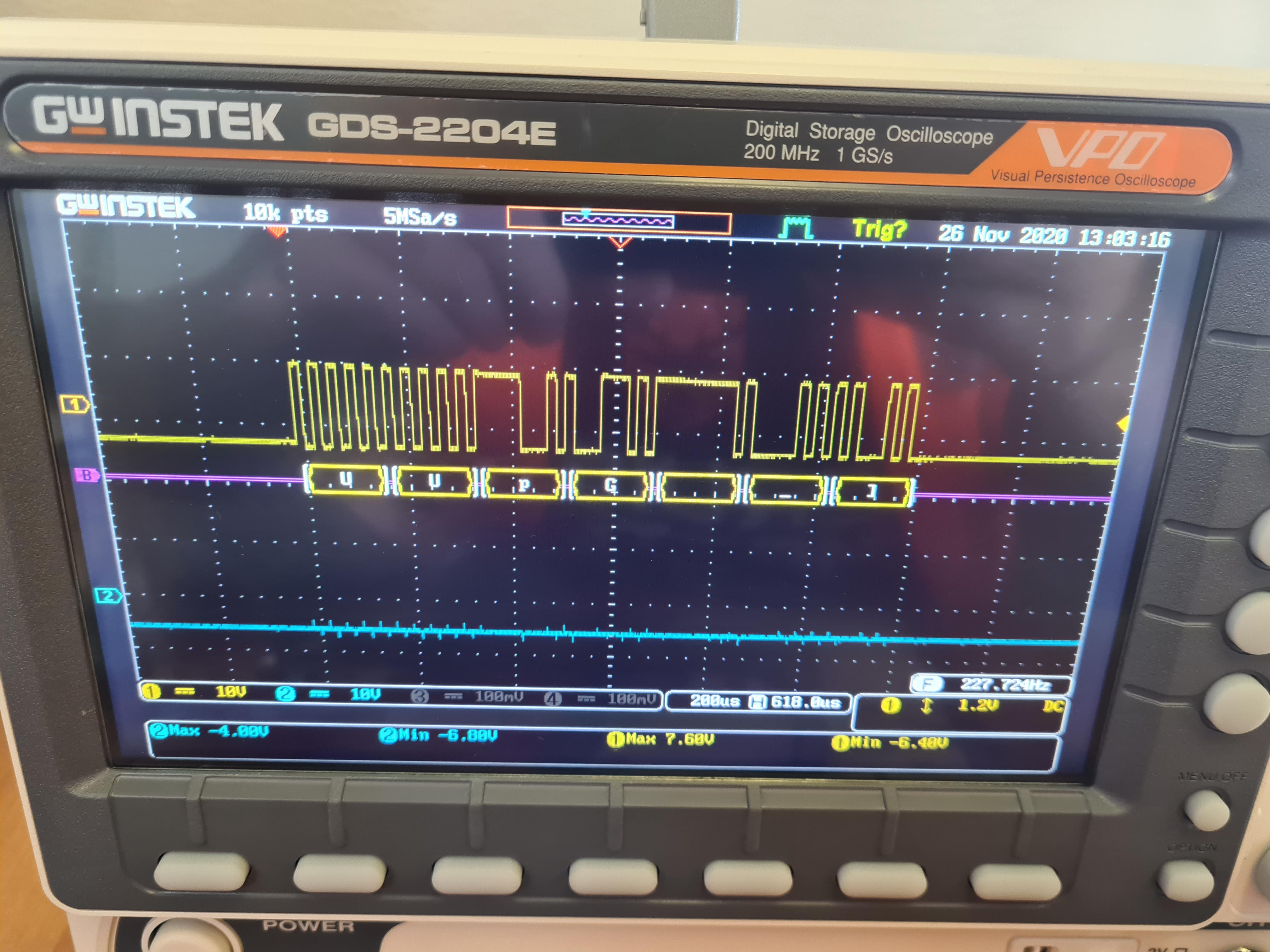
2. The Output of the MAX232 into the openIMU300RI can be seen in the scope figure below. Packet consists of 0x5555 | "pG" | 0 | CRC. From what I can tell this should be correct for a ping packet. I borrowed the code from the Acienna github to calculate CRC (Thank you ") )
)
3. The openIMU300RI does actually seem to react upon connection of the interface. It outputs a constant ~ -5V as would be expected for an RS232 idle when the interface is plugged in and powered up... and 0V when the interface is not plugged in but the IMU is still powered up
4. The openIMU300RI doesn't seem to ever react beyond idling. no return ping or NACK.
The Question
Can you see anything wrong with the ping packet I'm sending? Or another issue elsewhere? Is there maybe some quiet mode that I need to force it out of and if so, how do I do that?
