
Hi,
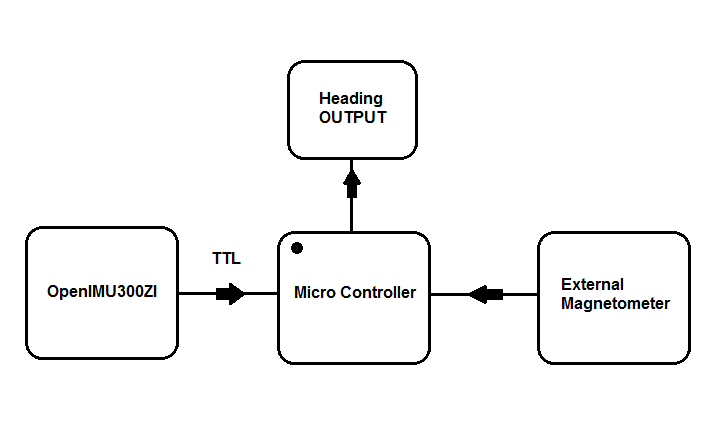
I need to increase the accuracy of HEADING on my system, I am using openIMU300ZI, may I use an external magnetometer sensor such as RM3100 or HMC2003??? openIMU's output is attitude, I want to use an external magnetometer sensor separately with openIMU on my system to combine calibrated magnetometer's data with openIMU's quaternion (VG mode). could you please advise an algorithm to combine these data together, or at least an article.
Best regards,
Amin.