Note: I have removed the content of this post while I double check some of it's contents - I don't have privileges to delete the whole post
OpenIMU INS performance with uBlox F9P + NTRIP corrections

@Luke-Reid hi,
I have been testing the same configuration myself, and I compare it to the ublox ZED F9R which includes a lower grade imu with fusion filter like the INS on openImu platform.
In what update rate are you working? did you connect the 1PPS input?
I connected the 1PPS signal and checked with update rate 1 per sec and also with 4 per sec.
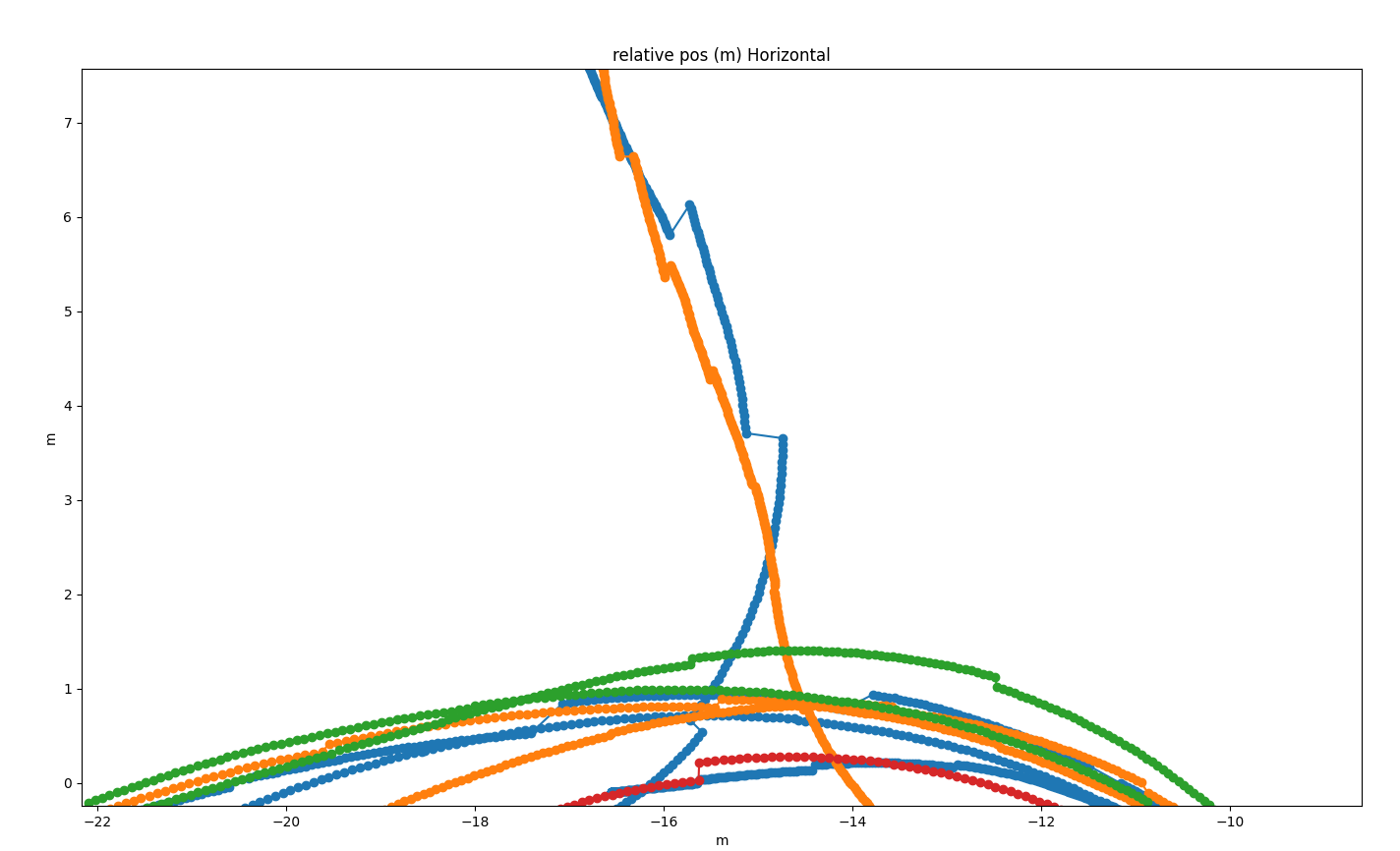
I check it by viewing the navigation output on XY plane and see what is the discontinuities between updates.
The results are not so good in my opinion comparing to ZED F9R.
If someone has an idea of what to do to improve these results I will be glad to hear it