@joshgc Hi Josh,
There are two tools and four ways to implement your requirements:
1、VIA NAV VIEW:(Use versions 3.1.7 and above)
Method 1 :
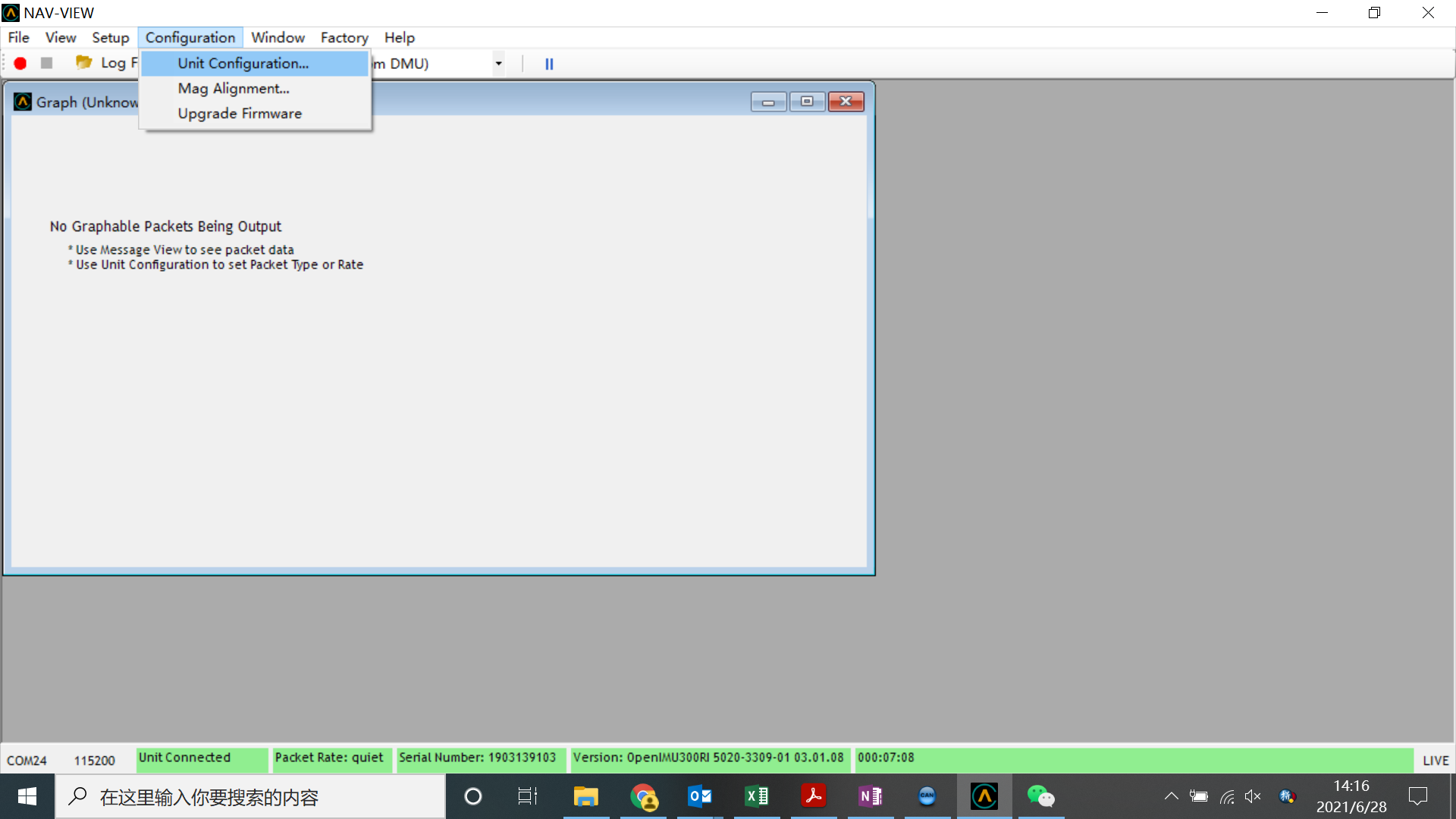
Open nav-view, click Configuration, and choose Unit Configuration,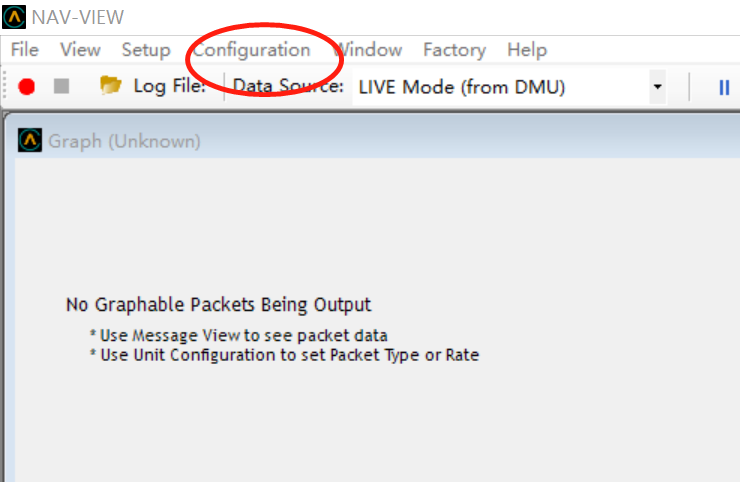
Select Can Parameter, check ECU BaudRate's current value and set Value to set 500kbs. Make sure that the permanent is checked below and click Set Value.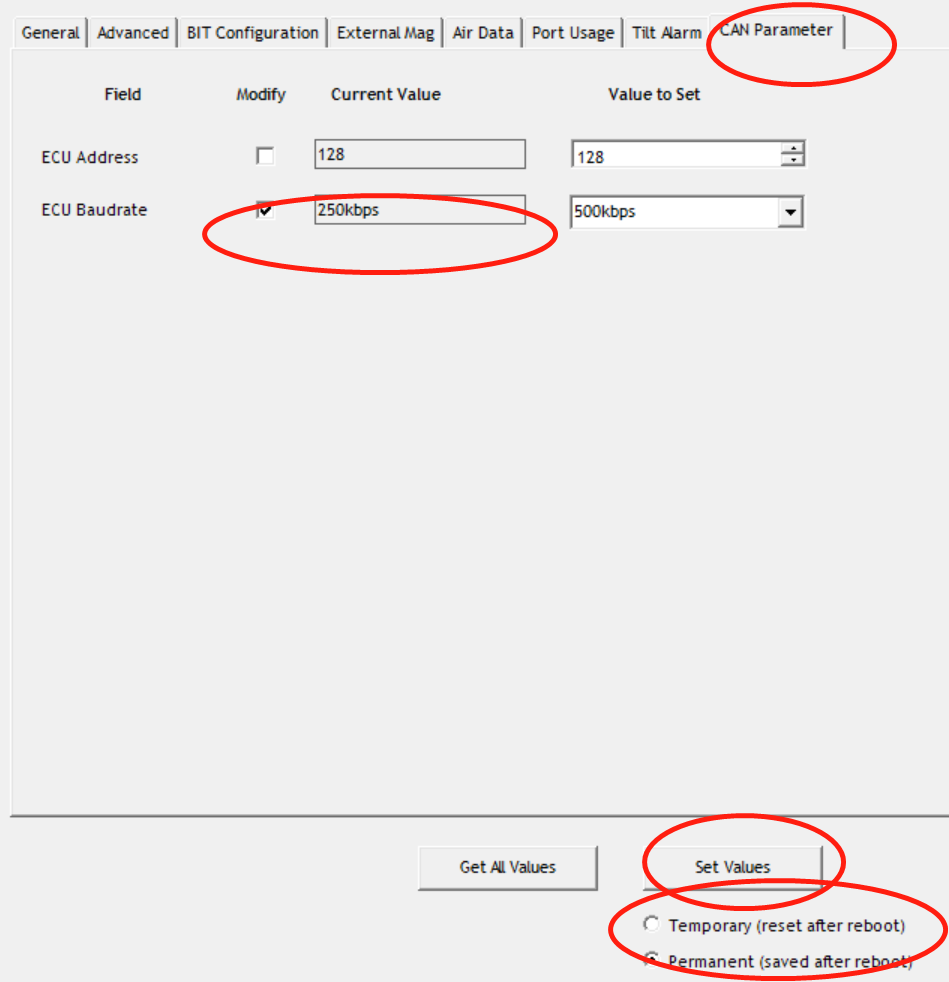
(Note: After setting, the UNIT has changed, but the NAV VIEW has not been updated. If you close the NAV VIEW, open it again, and return to this window interface, you will find that the CURRENT VUALUE has changed.)
Method 2:
Open nav-view, Factory, Fields Settings:
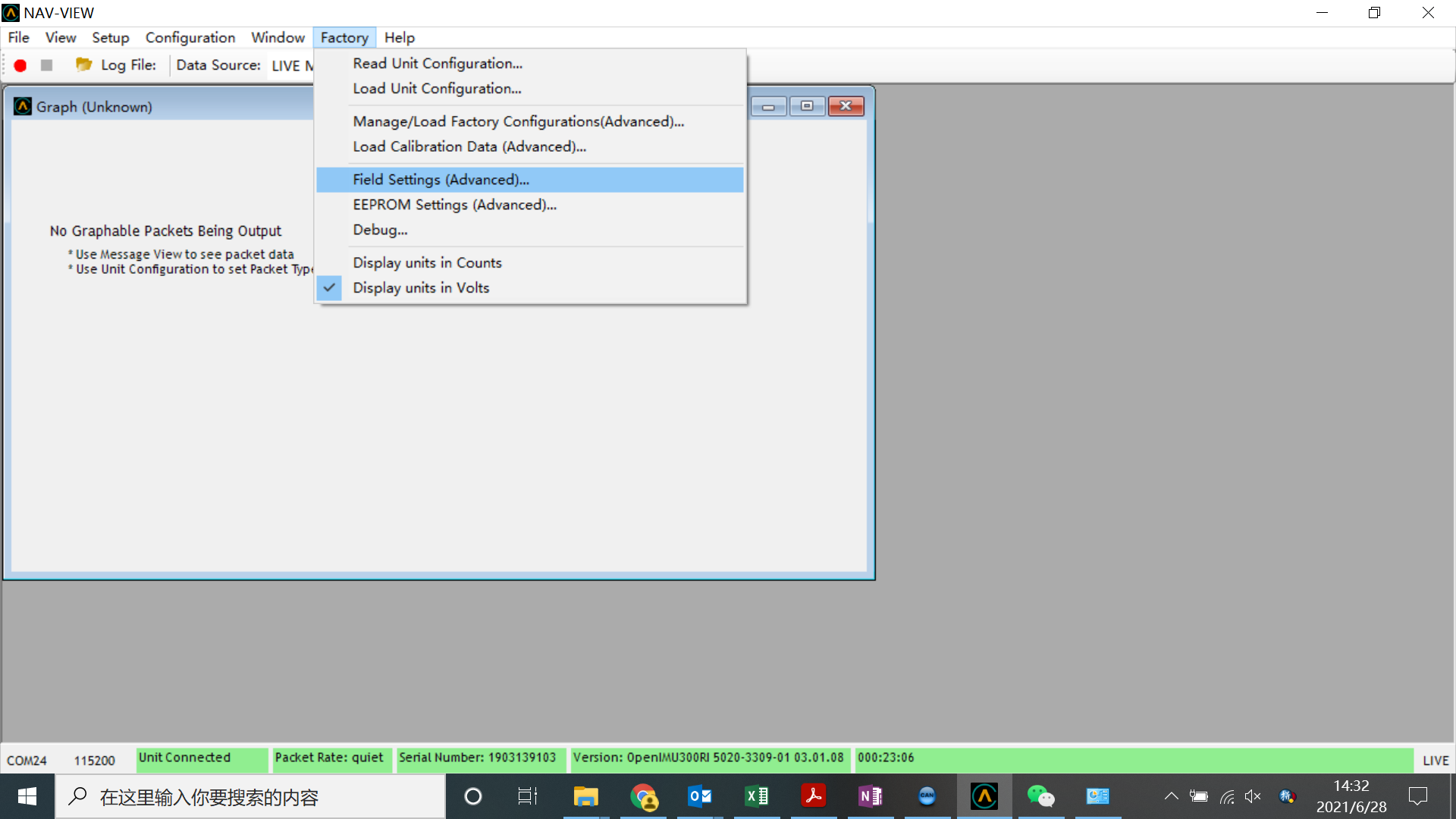
Tick read/Write EEPROM and the address you want to change. Enter 33 in Field, click Get Field to find the current value, enter 0 under Write Field, and click Write Field
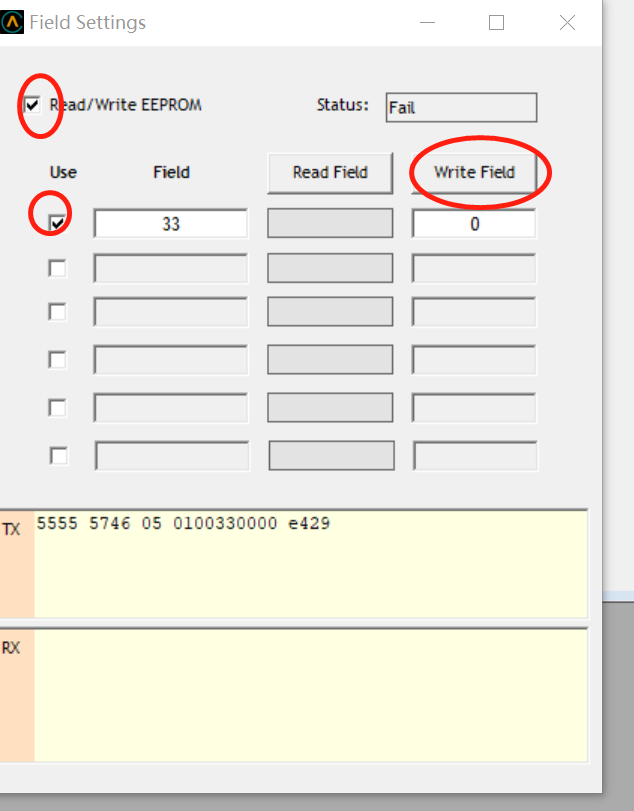
(Note: After setting, the UNIT has changed, but the NAV VIEW has not been updated. If you close the NAV VIEW, open it again, and return to this window interface, you will find that the CURRENT VUALUE has changed.)
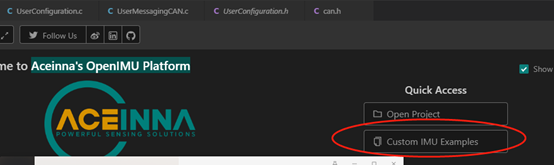
2、Using Visual Studio Code:
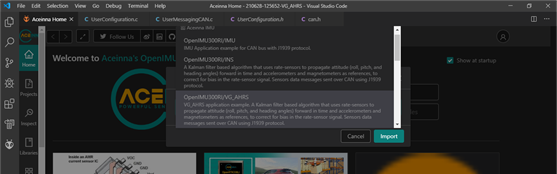
In Aceinna's OpenIMU Platform, select Custom IMU Examples. Check the "OpenIMU300RI /VG-AHRS" box to download.
After download firmware, choose code paths: SRC/user/UserConfiguration. C
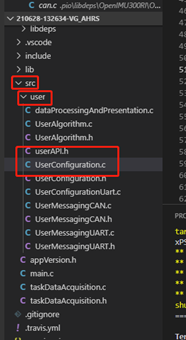
Locate the structure: const UserConfigurationStruct gDefaultUserConfig
Modify the structure member. Configure ecuBaudRate to _ECU_500K,
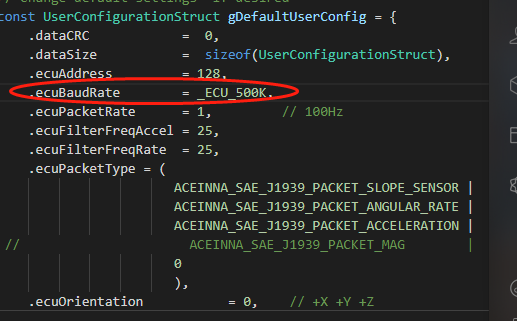
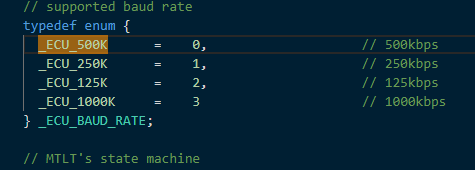
For structure members:.ecuBaudRate, the parameters of eCubaudRate are configured as follows:
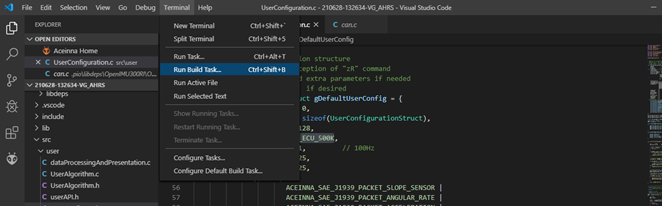
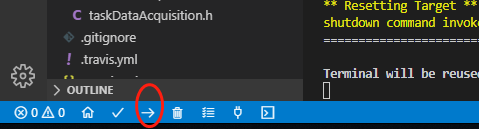
Select Run Build Task compile
Method 3 :(Using ST-Link)
Connect to Open300RI using ST-Link as shown in the figure
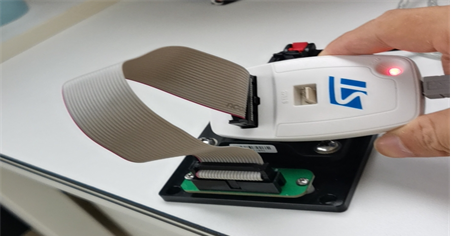
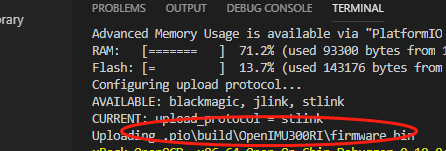
After compiling, UPLOAD the code after verifying that ST-Link is connected correctly.
Method 4 :(Use UART)
Locate the generated bin file, Ctrl + Click, and locate the file location:
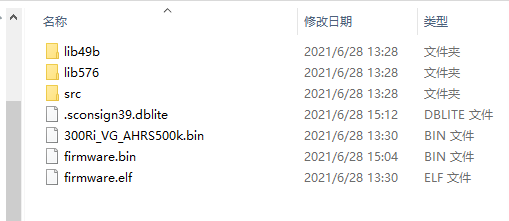
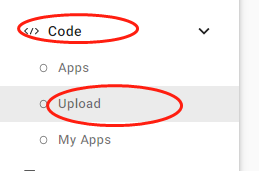
Open https://developers.aceinna.com/code/apps choose code upload, bin file generated by the file before,
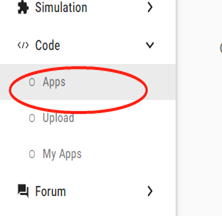
After uploading, find Private under code /apps
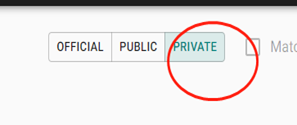
You can download the bin file,now.