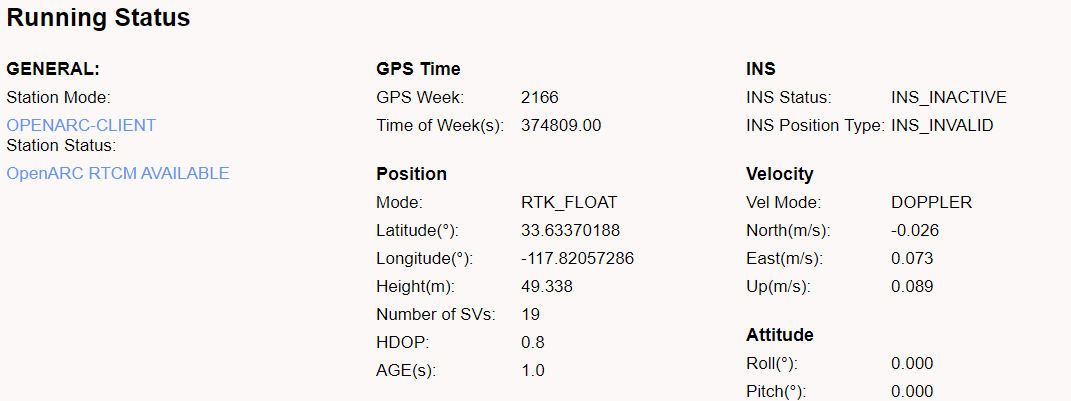
@zhihengcao said in OpenRTK INS Status INACTIVE / INVALID?:
Thanks. Do I need the Python driver running on a PC always in order for RTK to work?
Can I plug in the Ethernet to a travel router with Internet access and not connect the USB/UART & Python driver, but still have the system logging data? Or must I take a laptop with the Python running when carrying it on a test vehicle/aircraft?
I think since there is onboard M4 ARM processor, you could write firmware to connect to NTRIP through the Ethernet and log data. Where can I find any example firmware with source code?
With the EVK, you need a "storage" for the data logging, right? no matter UAR/Ethernet connection. I guess you mean logging data through ethernet and pull data from ntrip server over internet, but where the logged data saving to? on your platform?