Hi,
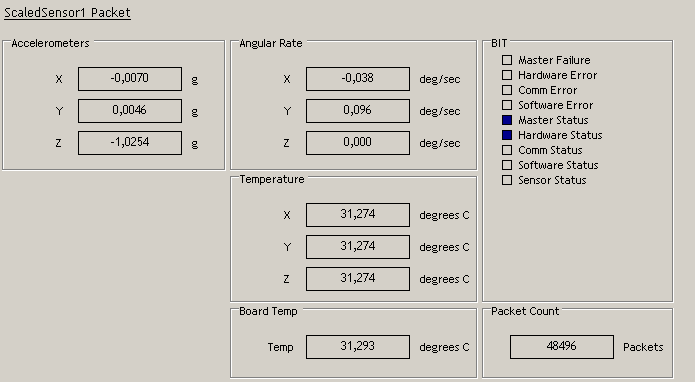
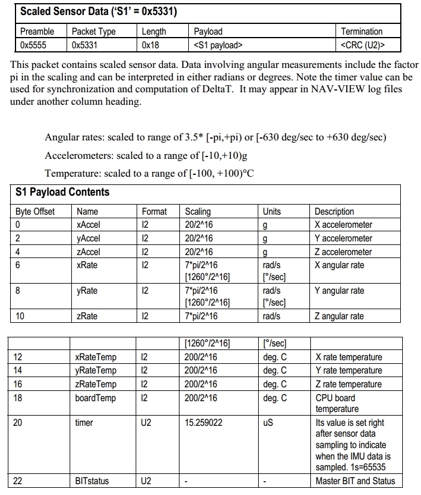
We are working with an OPENIMU300RI and trying to get the same values we see in NAVVIEW (acceleration/rate of gyro/temperature) using the HEX output directly from the sensor. For example:
We get this following characters:
5555 5331 18 fff2fffcf33400030003fffb280828082808280ed1eb0300 6a55
NavView hex value: ffff2
Navview output: -1.0254g
Decimal value we get after conversion: -2378
We are not sure how to convert from HEX to the values we see in NAVVIEW. After been playing with the IMU sensor we have identified acelerations + rate f gyro + temperature outputs, but we fail when try to get the proper values.
We are doing something wrong for sure. We are using the OpenIMU Documentation dated on Sep 27, 2019.
Thanks in advance!!!!