Attached pic for more clear description:

Erkuo Chen
@Erkuo Chen
1
Reputation
8
Posts
776
Profile views
1
Followers
0
Following
Posts made by Erkuo Chen
RE: DBC File Modification to support multiple MTLT305D On the CAN bus
posted in MTLT305D •
RE: OpenIMU300ZA in UART mode vs IMU example
posted in The OpenIMU Family •
Which IMU example you want to programed?
For the EXE, pls check whether it works well or not.
We doubt COM20 may be not right port which connect to user port of IMU, so try to confirm COM20 works by 2 ways:
- By device management of WIN 10, check which port is right by plug in and out the IMU.
- By serial port debugging tool, Pls check the COM20 port works or not. Pls try 57600 or 115200 baud rate firstly, Below example(a2 packet, 55 55 61 32 starting) received means connecting well, then you can disconnect the serial port debug tool and try to connect IMU by python-openIMU(or EXE).
RE: Compass accuracy / resolution
posted in The OpenIMU Family •
Assumption: IMU is calibrated for hard/soft iron and located at sea level
Take heading angle A as example, A = atan2(Mag_y, Mag_x), so evaluate the resolution influence should be based on combination of Mag_x and Mag_y.
Evaluation: dived to 2 conditions
1. one of x, y axis Mag value is 0. If Mag_x = 0, +/- 0.3mGauss change of Mag_y does not result in any impact.
2. both x & y Mag value are not 0. After calculation based on different Mag_x & Mag_y(different angles), the resolution 0.3mGauss could leads several 0.01 degree change.
So the resolution of IMU have negligible influence on angle heading generally.
RE: PC cannot detect RS232
posted in MTLT305D •
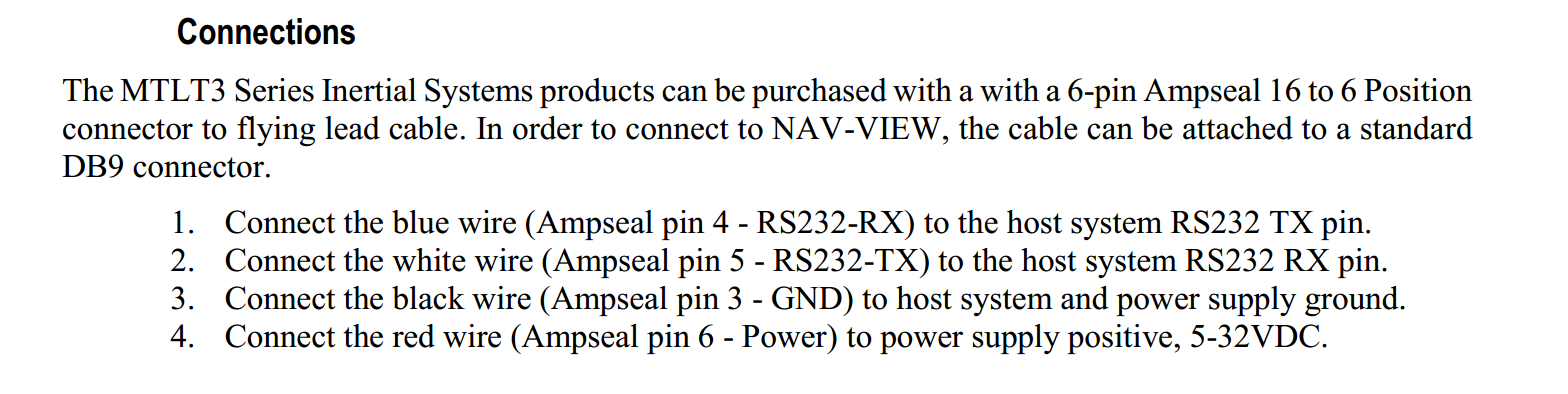
yes, thx for reminder. not so exactly description here in our manual.
Later we will update to confirm that keep sensor RX connect to TX pin of the wire harness connector.
RE: DBC File Modification to support multiple MTLT305D On the CAN bus
posted in MTLT305D •
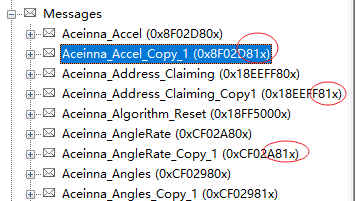
Update DBC file can realize many sensors worked in same one CAN net, Before update we need confirm the IDs of the all sensors may be connected.
For instance, we can connect 2 sensors in one CAN net, first connected one may be still 0x80 ID, the second have to try another ID by +1, at last may be 0x81 (inside default ID will updated and stored automatically ). now the 2 sensor IDs are 0x80 & 0x81.
How to update the DBC file? 1. recommend to use .dbc file editor, such as: CANdb++. 2. open the DBC file, find and copy 0x8F02D80x(one example) signal under Message module on left dialog interface. 3. right click and edit the new copy signal, change ID address from 0x8F02D80 to 0x8F02D81.
After new DBC file saved, you can load the new DBC protocol on your CAN testing tool for validation.
RE: Smooth GPS Breadcrumbs
posted in Product •
Aceinna HW parts such as OpenIMU300ZA, our online manual of OpenIMU mentioned:
The APP name, GPS/INS APP, stands for Inertial Navigation System, and it is indicative of the navigation reference functionality that APP provides by outputting inertially-aided navigation information (Latitude, Longitude, and Altitude), inertially-aided 3-axis velocity information, as well as heading, roll, and pitch measurements, in addition to digital IMU data
link: https://openimu.readthedocs.io/en/latest/apps/ins.html#gps-ins-app
also you can find related IMU example in below link:
http://127.0.0.1:8011/?start=%2F&theme=dark&workspace=aceinna&utm_source=platformio&utm_medium=piohome
RE: where is the complete PDF version for OpenIMU Developer Manual?
posted in The OpenIMU Family •
@oliver_364 pls check below two ways:
- on your mentioned website link, Click on "latest" button in bottom right, and then click PDF.
- directly store and click the link for PDF as below:
https://buildmedia.readthedocs.org/media/pdf/openimu/latest/openimu.pdf