When do you estimate to publish the next release?
And what would be the main improvements?
Posts made by Jonas Franz
RE: Function to enter distances between GPS antenna and IMU
posted in The OpenIMU Family •
RE: Algorithm stops sending any output after a while
posted in The OpenIMU Family •
Hi,
I am working on the custom IMU example for INS. All the baudrates are 115200 and the packet rates and debug message rates are 100 Hz. But is stoping at any frequency for packet rates and debug message rate.
Algorithm stops sending any output after a while
posted in The OpenIMU Family •
Hello everybody,
I am working with the OpenIMU300ZA.
I have the problem that the output user packets as well as the debug messages are stopping after different runtimes.
With the debugger I found out that the program is working in the files COM_buf_get.dbgasm and HandleUcbRx.dbgasm. But I couldn't figure out how it gets there or at least what it is doing there.
Thanks in Advance for your help.
Jonas
Function to enter distances between GPS antenna and IMU
posted in The OpenIMU Family •
Hi,
I am using the OpenIMU300ZA as an Inertial Navigation System.
Is there any function implemented in the custom IMU example where I can enter the distances between the GPS antenna und the IMU? Because technically the IMU and the antenna can not be at the same position when using an external antenna.
Thanks in advance.
RE: Get Data from the user and the GPS channel at the same time
posted in The OpenIMU Family •
Thanks for your answer.
How do I set the ODR to 20 Hz?
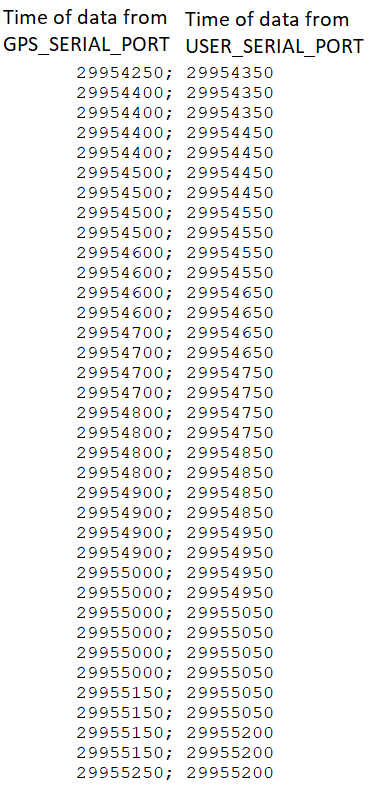
Because on the picture you can see is the output for the command:
_GenerateDebugMessage(dacqRate, 20);
For which I thought the OutputRate would be 20 Hz. But you are correct because it obviously isn't.
The time given in the picture is coming from the sensors calculated with the GPS time. So it is increasing correctly by itsself and it is the same timer for both signals.
I am implemented it in one task, I don't need a sync mechanism.
Get Data from the user and the GPS channel at the same time
posted in The OpenIMU Family •
Hi everybody,
I am using the OpenIMU300ZA.
While using the GPS serial channel with 20 Hz, I want to get messages from the user serial channel at the same rate.
Unfortunally always data from only one of those channels is saved for each period as you can see in the picture. But I need both messages from the same time.
The time in the picture is the particular time when he signal was measured, every 50 ms a message with a new signal is arriving at each port and the unit in the picture is ms.
OpenIMU300: Handle two GPS signals at the same time
posted in The OpenIMU Family •
Hello everybody,
I am using the OpenIMU300ZA evaluation kit.
Due to the usage of Magnets near the sonsor I can not use to the magnetic field measurements to get the orientation/heading.
So I implemented an algorithm to get data from a second GPS from the user port and created a new task for it. The GPS logs are for each GPS GPGGA and GPVTG.
The two datas have to be handled and processed at the same time but then the programm ends up in vApplicationMallocFailedHook() while handle one after another this problem does not appear.
Do you have any ideas, how to solve this problem?