Hi, the external crystal frequency is 24.806MHz.
What's is your application with OpenIMU300za?
thanks.
Posts made by Li YiFan
RE: OpenIMU300za external crystal
posted in The OpenIMU Family •
RE: Custom board RS232 communications issue
posted in The OpenIMU Family •
1.The OpenIMU300RI is data output silent, you should give a package rate to the unit to output data, for instance send command via serial interface:
update output rate to 10hz, 55 55 75 50 0C 04 00 00 00 0A 00 00 00 00 00 00 00 74 22
or change output rate to 100Hz, 55 55 75 50 0C 04 00 00 00 64 00 00 00 00 00 00 00 67 8B
2. visit develop tool for more informantion
https://developers.aceinna.com/devices/connect
RE: EVAL-KIT DMU381ZA-400
posted in DMU38x •
@Sanjay-Adkar You could download nav-view, connect EVAL-KIT DMU381 with PC with Micro USB line, and start logging using nav-view. please refer to link
RE: IMU383 SERIES USER MANUAL
posted in DMU38x •
- .0x4/6/8 is xyz_rate, 0xA/C/E is xyz_accel. both register could be read in polling mode.
RE: Why the factory don't do the magnetometer calibration before openimu300 unit release to customer? How to do the openimu300 unit magnetometer calibration?
posted in The OpenIMU Family •
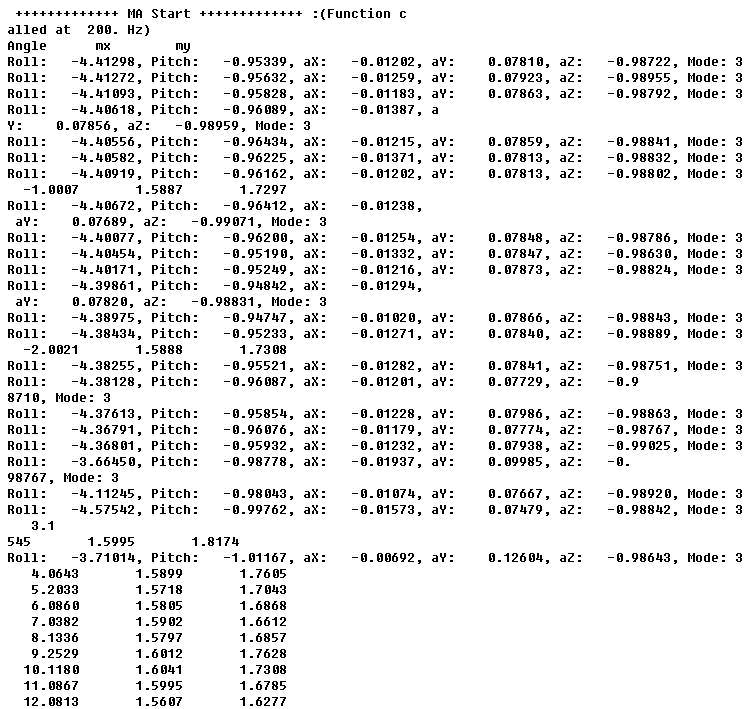
@Amin Hi Amin, you could send command to 300ZI unit via User uart interface(VG_AHRS, INS appication), and get the debug log from debug uart interface as below. As for the debug port, OpenIMU user could refer to UART debug port.
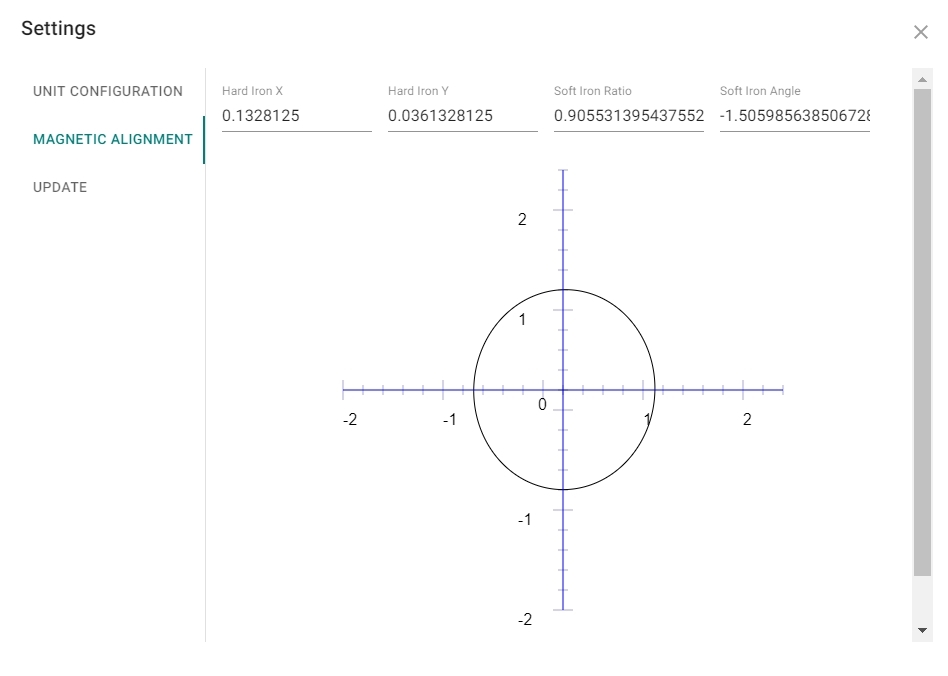
RE: Magnetic alignment process does not terminate
posted in The OpenIMU Family •
@Sylvain-Joyeux you should use VG_AHRS application and try again. the IMU application does not support Mag calibration with python driver.
RE: Magnetic alignment process does not terminate
posted in The OpenIMU Family •
Hi Sylvain Joyeux,
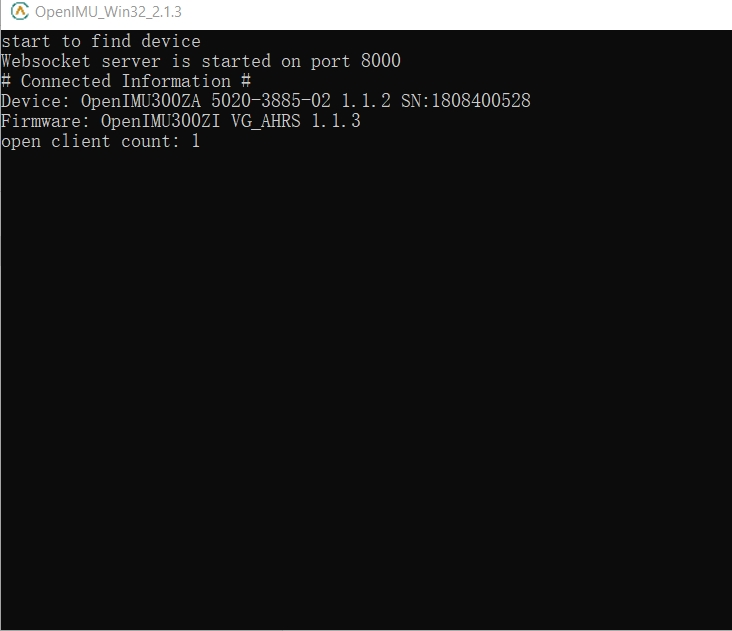
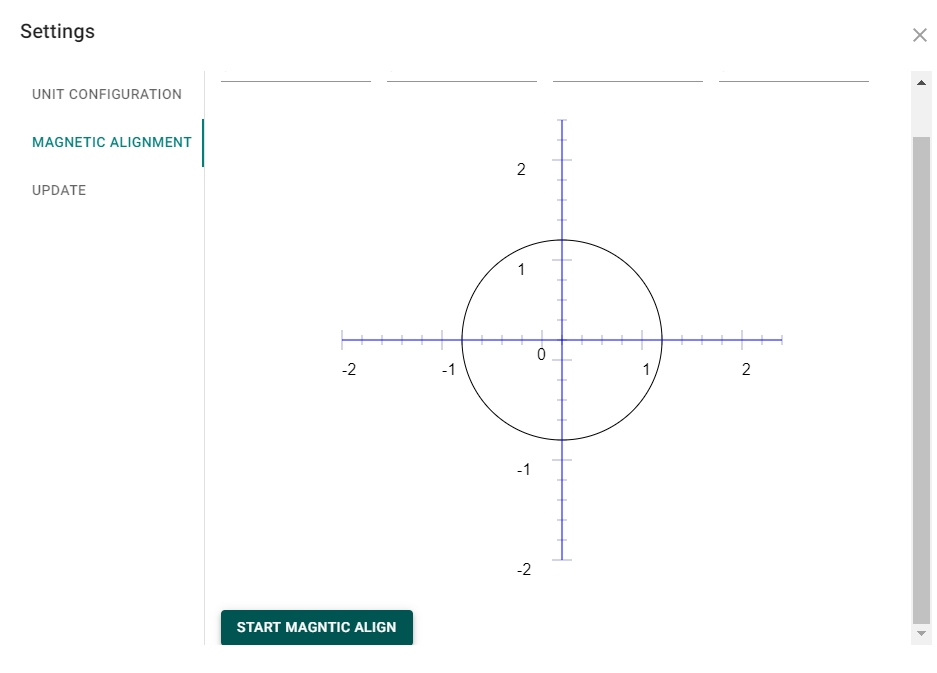
I checked the OpenIMU330ZI with firmware version VG_AHRS 1.1.3, it work normally on mag align process from my side as below, please reset IMU and test. Note: please do keep connection with PC during the mag align process or it will be never finish in case of disconnected.
RE: OpenIMU330BI 1PPS usage
posted in The OpenIMU Family •
Hi PineTreeWild,
It will take less than 10s to finish the sync with 1PPS in the begining.
The sync process is that:
-
CPU detects sync pulse and measures it’s period with sub-microsecond precision
-
If period is within 0.01% of target value for few consecutive periods signal considered to be valid and system will sync to it.
RE: OpenIMU300ZA Docs Missing?
posted in The OpenIMU Family •
@TimBevan Hi TimBevan,
- conntion is the second picture as your colleague interpreted.
- the default orientation(right-hand system)
 . btw, you could check/change the orientation in the setting of refer to link
. btw, you could check/change the orientation in the setting of refer to link
RE: SPI Connection not possible
posted in The OpenIMU Family •
@JeromePerdrizat Hi,JeromePerdrizat ,thanks for update message, what kind of unit in your hand, only a OpenIMU300ZI module or a set of OpenIMU300ZI development Kit?
RE: openIMU300RI Can't change CAN Buadrate
posted in The OpenIMU Family •
@SeppW sorry for the late message. Yau are right, change the configuration, compile and reprogram 300RI will be fine. 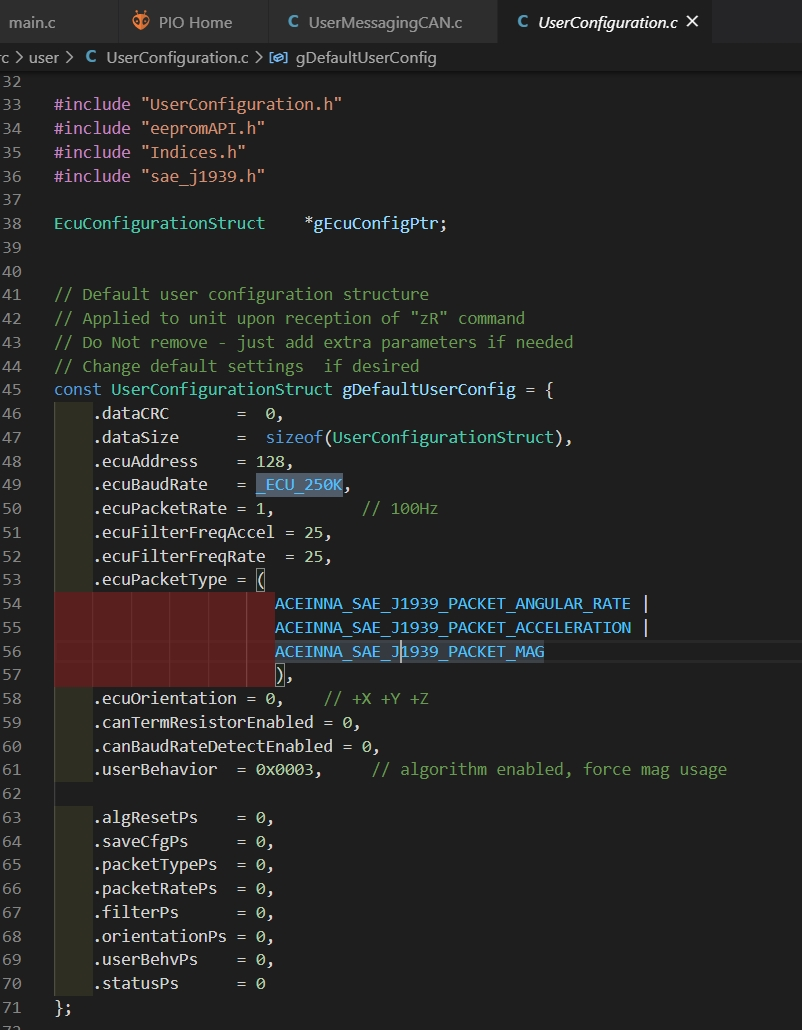
RE: Is it possible to flash programs onto the 300RI?
posted in The OpenIMU Family •
@bibbi Hi bibbi, sorry the late message, my colleague @cek is testing the INS application for 300RI, he will update after finish the test.
RE: OpenIMU330BI - Decoupling Needed? Eval board doc...
posted in The OpenIMU Family •
@Jack-Morrison Hi Jack, please check the axis orientation 
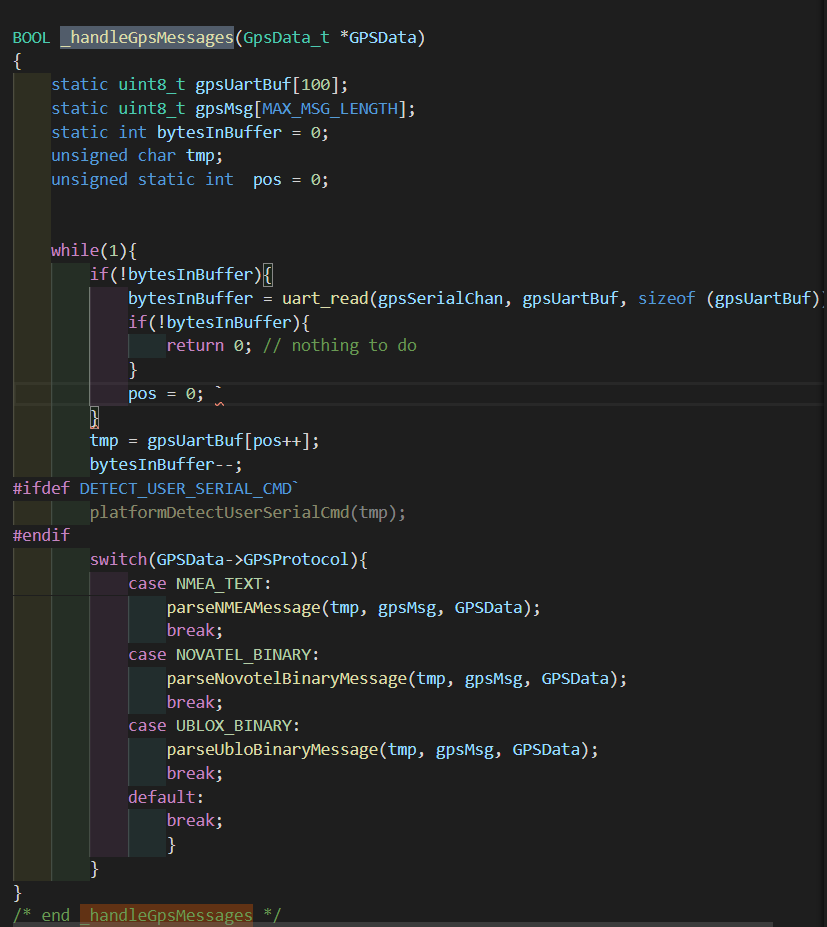
RE: 怎样同时输出组合的经纬度和GPS原始经纬度
posted in The OpenIMU Family •
@hujia Hi Hujia,
目前我们开源代码支持 NMEA, uBlox Nav-PVT and NovaTel Bestpos/Bestvel 这三种协议的GPS信息。
1.组合的经纬度: INS app可以通过串口输出的e2包 直接得到组合后的经纬度信息,请参考 串口e2包
https://openimu.readthedocs.io/en/latest/apps/ins.html#gps-ins-app
- GPS原始经纬度:取决于你用什么接收机,输出哪种GPS协议解析后的信息。 我们没有现成的串口包可以输出数据,你可以自己创建一个包类型通过openimu串口输出,或者直接从接收机拿到解析后的原始经纬度信息。
RE: OpenIMU300RI: can not be detect after upgrade VG_AHRS app
posted in The OpenIMU Family •
@swj Hi swj, it seems the application bin is broken. You could try to boot start from bootloader and download the application bin again as the following steps:
- run the Webserver_Win32_1.1.6.exe -f T to enter bootloader mode. Webserver_Win32_1.1.6.exe attachedrecover_tool.zip.
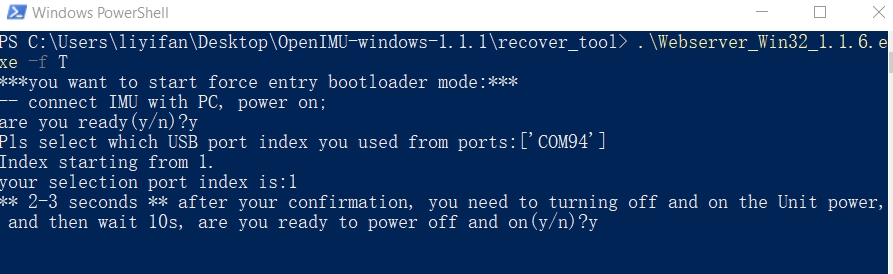
reset the 300RI unit.
-
If the BOOTLOADER enter successfully, please open https://developers.aceinna.com/devices/record-next
and press button UPGRADE
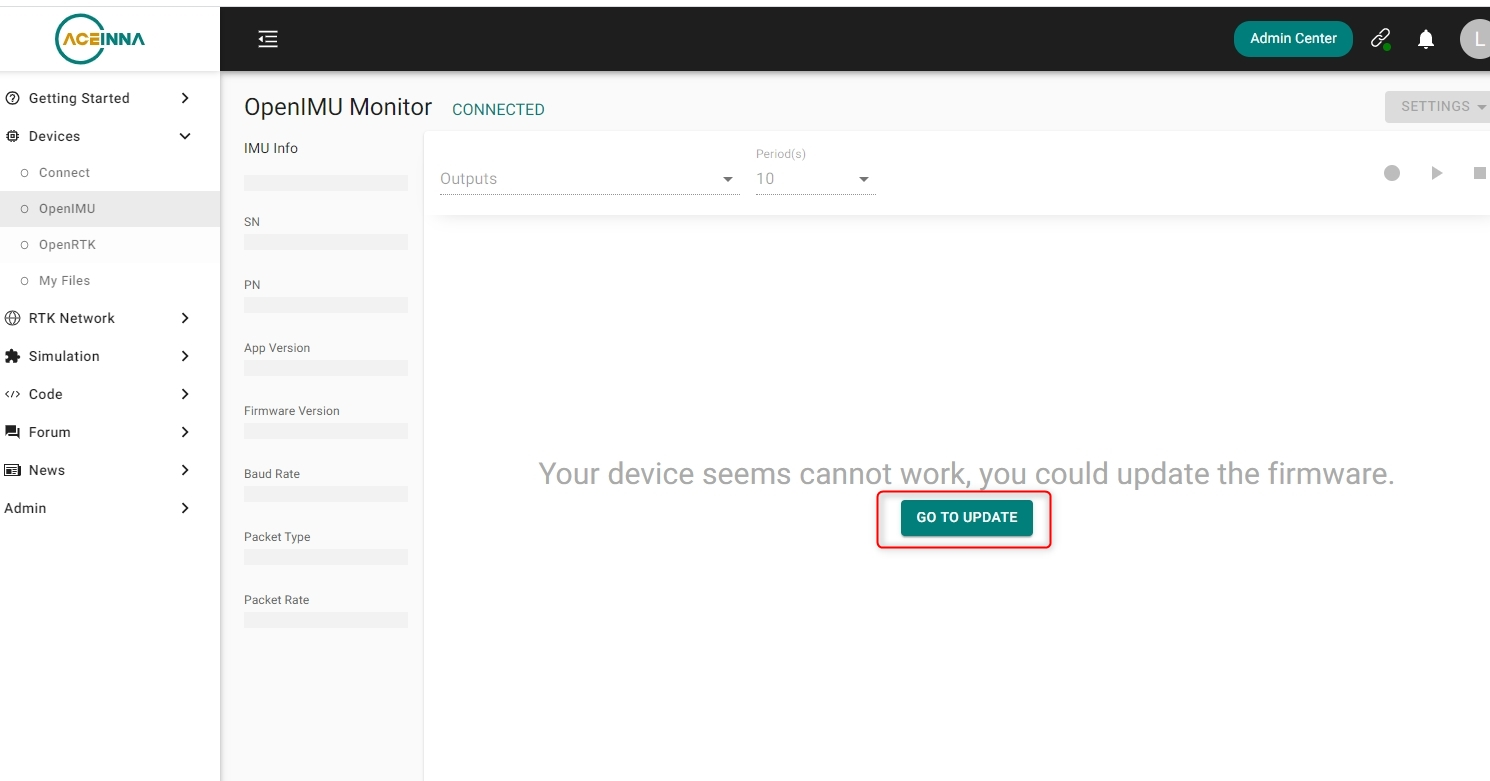
-
Choose the 300RI app bin file and update. ![2020-03-05_11h26_00.jpg]
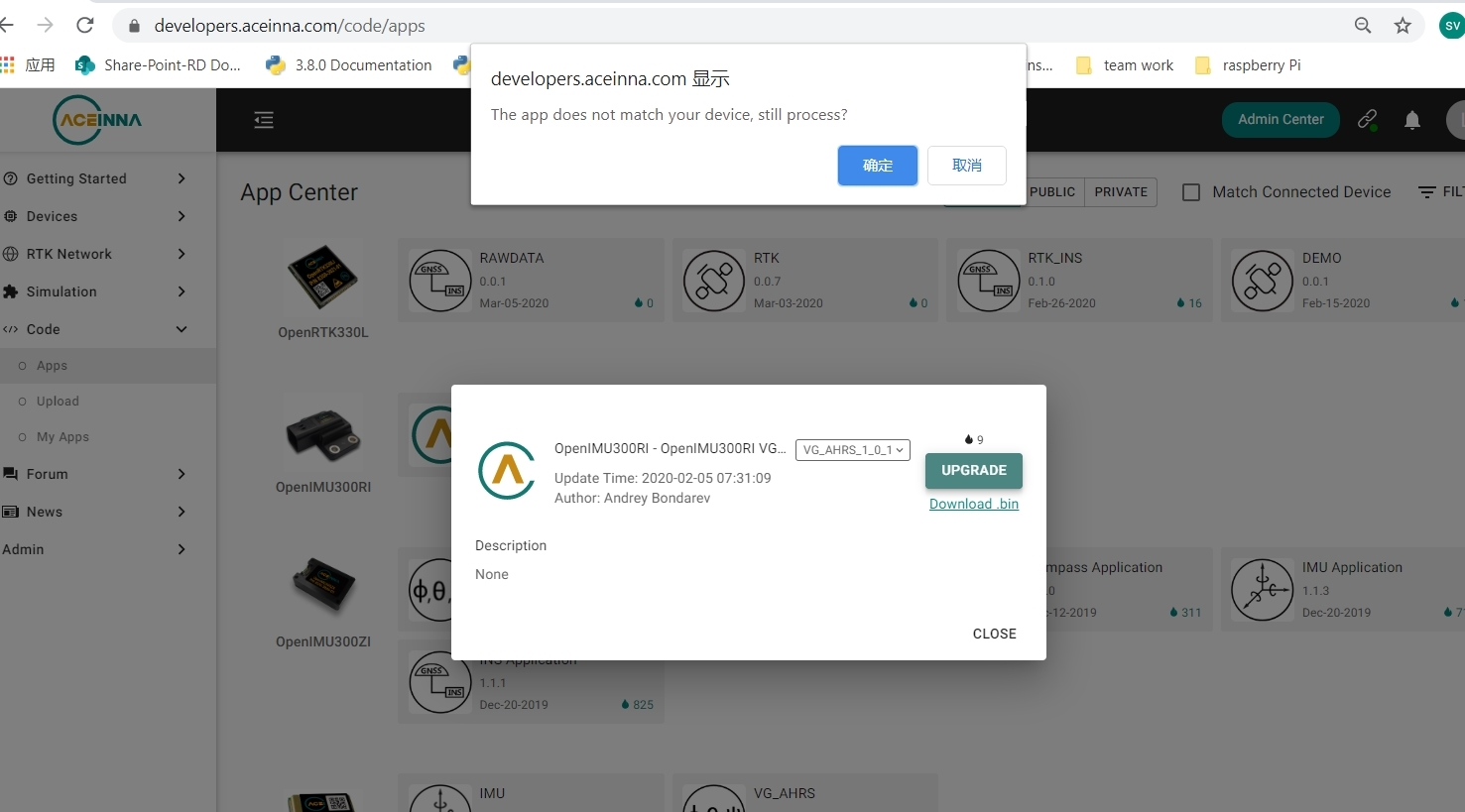
please try and feedback to us, thanks.
RE: Base Station Correction Options with Open IMU
posted in The OpenIMU Family •
@jstafford it's up to your application, what do you want with OpenIMU?
RE: External Connections to Raspberry Pi
posted in The OpenIMU Family •
@jstafford Hi, you could use SPI/CAN/Uart interface communcate with Pi3 to get IMU data, some reference code for you to check.
https://github.com/Aceinna/python-mtlt
https://github.com/Aceinna/python-spi