UPDATE 2:
I understood data in some packets like a1 ITOW is already written in the csv.
In order to make the app write it also in packet e2 (the packet in the INS app) I've just to modify the json file or something else?

matteo
@matteo
0
Reputation
9
Posts
502
Profile views
0
Followers
0
Following
Posts made by matteo
RE: Time information
posted in The OpenIMU Family •
RE: Time information
posted in The OpenIMU Family •
UPDATE:
I was able to understand what those columns mean: specifically they are the time from which the board was powered on.
Thus, there Isn't a way ti sinchronize in post Mission the IMU output and GPS positions.
How can I add a columns to the CSV file in order to have a time reference to fuse data?
TOW( time of week) should be a good
way and, diggin into the code It seems that is already computed by the INS app so I should Just take It and print It into the CSV. How can I do It?
Time information
posted in The OpenIMU Family •
Dear all,
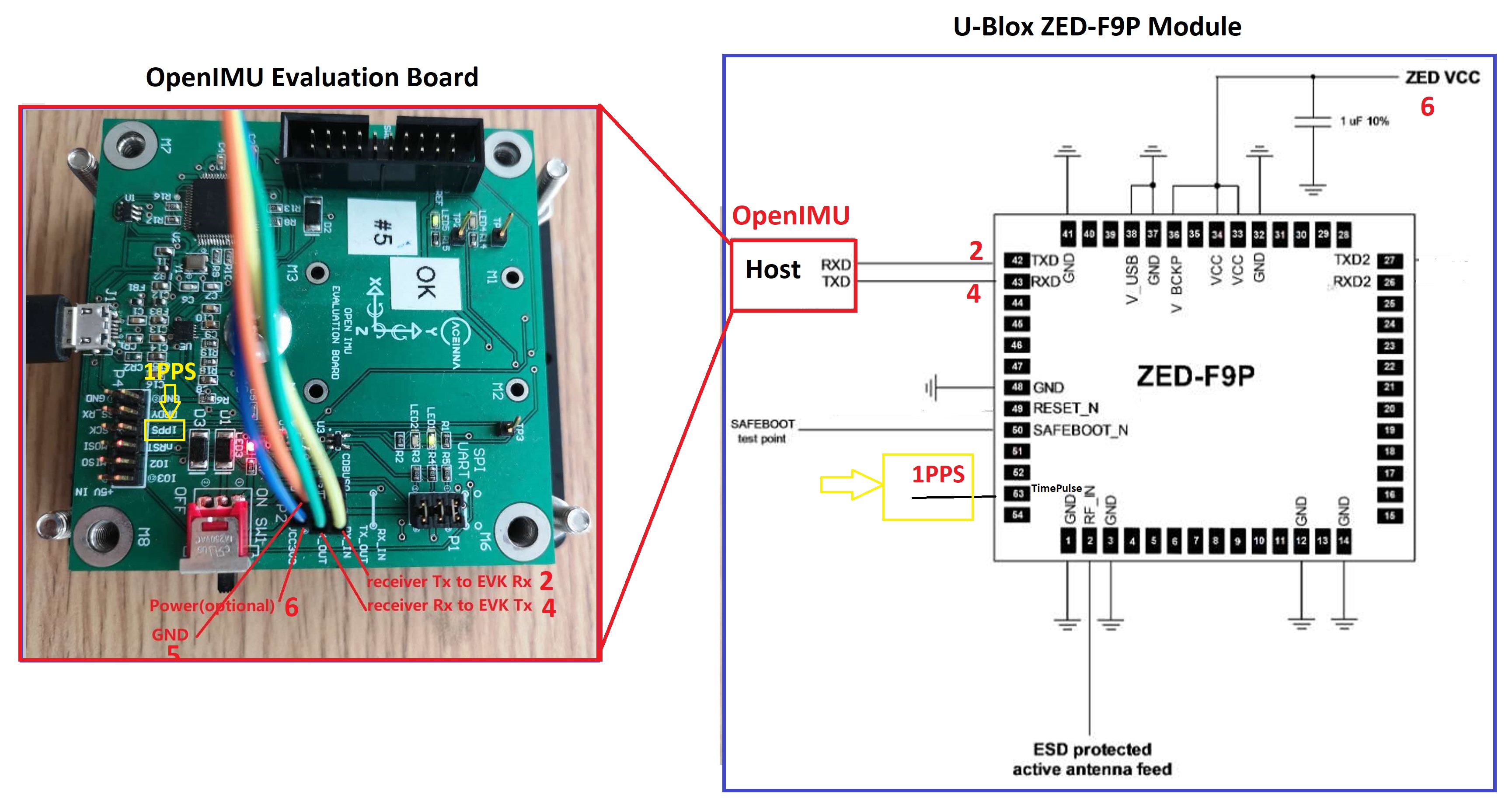
I'm running INS app with u-blox zed f9P (NMEA protocol) and openimu 300ZI eval kit (also connecting 1PPS).
The output from IMU in .csv format has the first two columns that regard time information, namely TimeCntr and Time. Can anyone explain what these times are referred to?
This is useful if one want to fuse data in postprocessing with another KF (some time reference or time stamp to sinchronize GPS data and IMU sensors readings is needed).
Hope someone can help me.
Thanks
Matteo
RE: 330ZI connected but not detected
posted in The OpenIMU Family •
Dear community,
I was able to let it work.
It was a jumper position issue.
Thanks
Matteo
330ZI connected but not detected
posted in The OpenIMU Family •
Dear community,
I can't figure out why I can't connect anymore to imu. When I run openimu command in vscode It find tne connected device (openimu 330ZI EVK) but can't connect to it.
With the previous installation of Ubuntu I had no problems.
When a couple of days ago I had to reinstall Ubuntu 16.04 no way to connect to imu.
I followed all insttrucions to get it work.
Download and install vscode.
Built from source python-openimu from Aceinna repo of github
I also gave rights to USB.
Moreover I rebuild factory data on EEPROM with ST-link following the tutorial on readthedocs (Warnign before starting development).
I'm starting to think that It could be a python issue. Can anyone explain me steps to follow and wich python version I need?
Thanks
Matteo
RE: INS APP ISSUE
posted in The OpenIMU Family •
In the file Userconfiguration.c is set to NMEA protocol and 115200 gpsbaudrate.
In ucenter i've disabled all msg other then the three NMEA that i need. My target is to let them communicate via UART1 so in ucenter i have activated the UART1 and USB (just to see if i can see message on serial monitor) in port configuration.
Maybe this could be a problem?
Anyway in the manual is said that if i want to use header P2 (where i have actually connected rx out and tx in of the GPS) the header on 5-6 of P1 should be off. For example if Serial Channel 1 used for connection with some external device (GPS or other).
But this is in contrast with the photo of pin connection that i have found where is clear that every jumper on P1 is ON.
Thanks
RE: INS APP ISSUE
posted in The OpenIMU Family •
Yes, i've already checked it. I've enabled NMEA GGA, RMC,VTG as the guide says. Opening a serial monitor or via text console of u-center i can see them.
What could be the problem?
I'm running out of ideas.
thanks
INS APP ISSUE
posted in The OpenIMU Family •
Dear all,
i want to run the INS APP but most of the times the NMEA messages are not seen by the openimu and so there isn't position available.
I have the openimu 300ZI eval kit, u-blox zed-f9p and pc running ubuntu 18.04 with u-center 20.01 and vscode.
My procedure is the following:
- everything is connected in the right way because sometimes i was able to let it work (so, if the connection was incorrect i would never get position in aceinna navigation studio)
- i connect ublox to pc and i set in ucenter the required NMEA messages to output on UART 1 (RMC, GGA, VTG);
- i open vs code (build the app, upload it to openimu board);
- run openimu (once connected with cli i can see all the parameters included those for gps);
- if i type record it writes me a csv file with the columns of GPS position all 0;
- if i run python webserver.py and i open aceinna navi studio in chrome it has the same behaviuor (works everything but no position from gps);
I can't figure out why sometimes it works and sometimes not; i always do the same procedure.
I'm a little bit confused.
Con anyone help me?
Thanks
Matteo