many thanks. This product seems very good
0
Reputation
10
Posts
692
Profile views
0
Followers
0
Following
Posts made by mbirley
RE: Variables
posted in The OpenIMU Family •
same as for the other question is a + Y value for the pointOfInterest in front of or behind the IMU?
RE: IMU Offset to the GPS
posted in The OpenIMU Family •
@Dong-xiaoguang
Can you please be more specific. Can you use the enclose diagram to show if the number should be positive or negative.
For example if the IMU is located at the bottom of the diagram and the pointofinterest is at the center of rotation and the gps is in front of both points would the value be positive or negative. Same for the other axes
I am assuming that the IMU is positioned so that Y axis of the printed arrow is pointing in the direction of travel of the robot and imu and that a turn to x would be a turn to the left
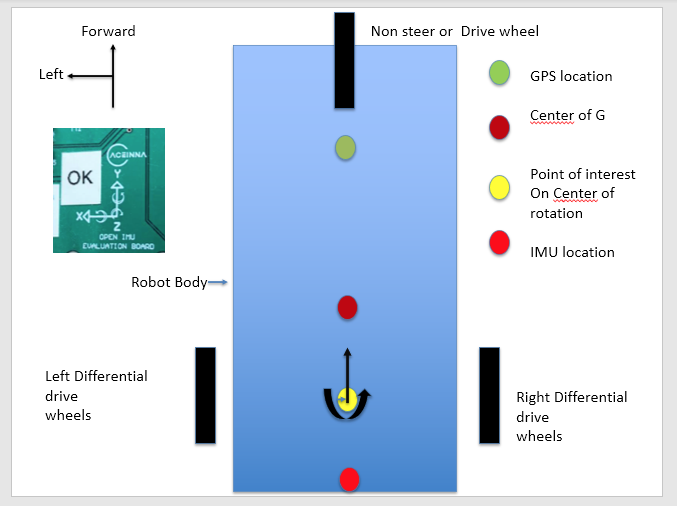
cid:image001.png@01D6E823.708C4A70
Variables
posted in The OpenIMU Family •
What is the function of these variables
.pointOfInterestBx = 0.0,
.pointOfInterestBy = 0.0,
.pointOfInterestBz = 0.0,
I am using the INS app with a gps. In this situation the magentometer calibration is disabled. .hardIron_X = 0.0,
.hardIron_Y = 0.0,
.softIron_Ratio = 1.0,
.softIron_Angle = 0.0,
should the softiron ration still be 1????
IMU Offset to the GPS
posted in The OpenIMU Family •
Hi
In userconfiguration you have these variables. I want to locate the variables used to define the offsets between the GPS antenna and the IMU. Are these the variables and what is their sense do you have a diadram ie what is the difference between - and + x and - and + y. Same for Z
with regard to orientation what would - signs do to the orientation ie do you have a diagram
.leverArmBx = 0.0,
.leverArmBy = 0.0,
.leverArmBz = 0.0,
RE: Connecting to a RaspberryPi and saving output data
posted in The OpenIMU Family •
@cek said in Connecting to a RaspberryPi and saving output data:
pls use 1st port which is used for result data output, also you mentioned binary data from it.
pls check topic_8, 8. how to check the serial data by serial tool? pls receive data in HEX format or ascii format of each bytes.
https://forum.aceinna.com/topic/93/top-topics-of-common-operations-with-openimu-products/2
if you want to make your own scripts to receive serial data, pls refer to our repo python-driver:
https://github.com/Aceinna/python-openimu/blob/bugfix/openimu.py
I want to reproduce this and record it in a csv file on a pi
 )
)
RE: Connecting to a RaspberryPi and saving output data
posted in The OpenIMU Family •
I should have said that I can view data via the Aceinna Navigation Studio however at the moment is is of less interest.
I want to be able to load up one of your working application. Tie down or place the IMU. Switch on and record the output to a raspberry pi. We already have code for the pi to read and save the incoming ascii data.
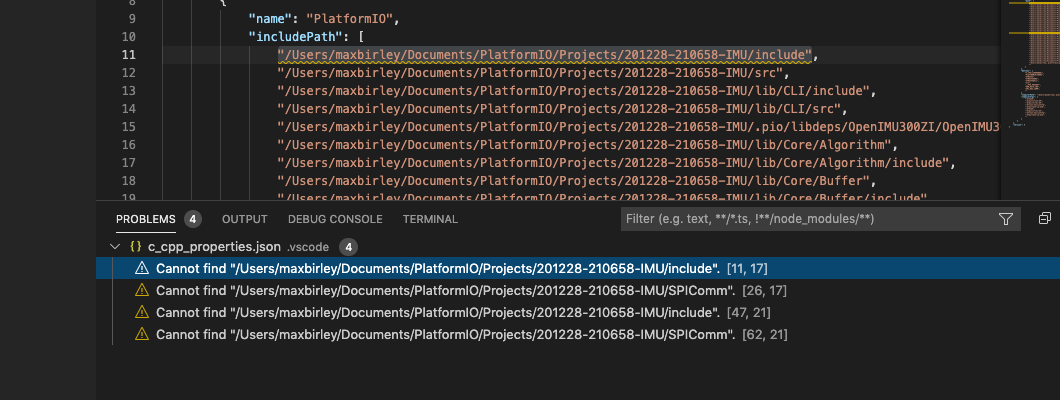
Error for include file
posted in The OpenIMU Family •
As you may have gathered I am a newbie for your product so I may ask a few too many questions at first.
Can you let me know why I have this error
RE: Connecting to a RaspberryPi and saving output data
posted in The OpenIMU Family •
Thanks for your feedback
I am still getting NON ASCII data on the first port when I use coolterm. I am using an apple mac so any terminal program should have a mac version. Until I have a better understanding of your system I do not want to make any changes to your code. I am happy to change parameters. Can you please provide step by step instruction to get ASCII output to a port and to view that output.
The manual shows that it is possible but so far I can not get anything other than the junk unreadable output.
Question. How do I invoke the Command Line interpreter?
Question How do I get python to appear in the Terminal drop down window. Do I need to be working on a .py program?
Connecting to a RaspberryPi and saving output data
posted in The OpenIMU Family •
I have a OpenIMY300ZI and have uploaded the IMU then AHRS and then INS applications to the unit (on the Evaluation Kit) and can review IMU data via the ANS, Can anyone tell me what settings we need to change to divert this output so that we can read Ascii data on a raspberry pi, windows or Mac.
Currently when we read the 1st com port we get what looks like binary and on the 3rd serial port we get nothing
regards
Max