python-openimu is an open source project. You can fork it and modify as you expect. It is suitable for custom development.
Posts made by song yi wei
RE: python-openimu vs platformio
posted in The OpenIMU Family •
RE: Certificate Error with Visual Studio Code
posted in The OpenIMU Family •
ModuleNotFoundError: No module named 'can'
About this issue, the temporary solution is to install a dependency named 'python-can'. And we will fix it in next version.
And could you supply the detailed wrong msg from the executable?
RE: IMU300RI No Comms after firmware update failed on studio
posted in The OpenIMU Family •
Is it fixed by yourself? If you still have problem while upgrading firmware, could you share the FW to us, so that we can simulate the issue at our side?
RE: How to use Python SDK to get position data?
posted in OpenRTK •
@k2ironman Below is some references for you,
- pip install openimu
- sample code
import time
import threading
from aceinna.tools import Detector
def handle_receive_continous_data(packet_type, data):
# the position data will be in packet_type equals 'pos'
print(packet_type, data)
def on_find_device(device):
# prepare to use
device.setup(None)
# listen the output data
device.on('continous', handle_receive_continous_data)
def prepare():
detector = Detector(
device_type='OpenRTK',
com_port='{DEVICE COM}',
baudrate=460800)
detector.find(on_find_device)
if __name__ == '__main__':
threading.Thread(target=prepare).start()
while True:
time.sleep(10)
For more advance usage, please take a look of the source code.
RE: Please fix firmware update online button
posted in OpenRTK •
It seems there is a sync command failed, please power on the device again if you encounter the firmware upgrade issue through web.
RE: OpenRTK330LI: Where can I find the system recovery image ?
posted in OpenRTK •
Try to refresh the page. The automatic connect check may be past.
RE: How to update firmware after online update fails
posted in OpenRTK •
If the green LED always flash, when it powers on, it means the device is in bootloader. We may do some steps to get it back.
-
Send
JAcommand to switch to app mode. The raw command should be0x55, 0x55, 0x4a, 0x41, 0x00, 0xf5, 0x9d -
Upgrade firmware with command line.
Steps to upgrade OpenRTK330L_GNSS_RTK_INS_v23.05.bin
- Power off and on your device.
- Open python driver with specified parameters.
Webserver_Win32_2.5.0.exe -c {the actual COM port} --cli. Wait for the device connected. - Use command
upgrade {the firmware path} - Wait for the upgrade progress finished.
RE: UART connection for flashing: OpenIMU300RI
posted in The OpenIMU Family •
Please take a look of the page https://developers.aceinna.com/devices/connect, and try to use python-openimu to connect.
RE: Connection error
posted in The OpenIMU Family •
Send command 55 55 70 47 00 5D 5F with hex format in baudrate 57600, to check if you can get response. If there is any response with serial number, please try to upgrade the firmware again.
RE: Can program unit, but then it won't communicate
posted in The OpenIMU Family •
Here is screenshot with the new bin.

RE: Can program unit, but then it won't communicate
posted in The OpenIMU Family •
The INS app may take more time than other apps while connecting, and to make the connecting more fast, it is better to assign startup parameters when you use webserver.
The command looks like as below,
.\Webserver_Win32_2.3.2.exe -b {baudrate} -c {com port}
Please also try to send pG command with a serial port debug tool to make sure the device can response its device info.
RE: Can program unit, but then it won't communicate
posted in The OpenIMU Family •
If the INS app is developed by you ,is there any data output when you use a serial port debugging assistant tool?
You could also try to send command 'pG' in a serial port debugging tool to confirm if the device could response its device info.
The hex command is 0x55 0x55 0x70 0x47 0x00 0x5D 0x5F
If there is no response, you should check the source code.
RE: Can program unit, but then it won't communicate
posted in The OpenIMU Family •
- Which INS app you are using? Is it from our official release?
- If the INS app is developed by you, could share it to public in app center?
RE: Can program unit, but then it won't communicate
posted in The OpenIMU Family •
Luke, there are some suggestions.
-
Flash the backed up firmware to the device with ST-Link again.
-
Modify the packet rate, we think the packet rate may changed to 0Hz.
a) Connect device with python driver https://developers.aceinna.com/devices/connect
b) Update the packet rate on page. https://developers.aceinna.com/devices/record-next

-
If there is still no packet data output, please leave the serial number of the device, we will try to send the whole bin to you.
RE: Need original OpenRTK330 F/W image.
posted in OpenRTK •
Please make sure the device can be detect by ans-devices.exe before you use web to monitor data. It would speed up the detect progress if you specify some startup parameters.
It is useful to assign com port and baudrate parameters
$ .\ans-devices.exe -c {your com port} -b {actual baudrate}
There is a description for your reference.
https://github.com/Aceinna/python-openimu/blob/master/docs/user manual/en.md#startup-arguments
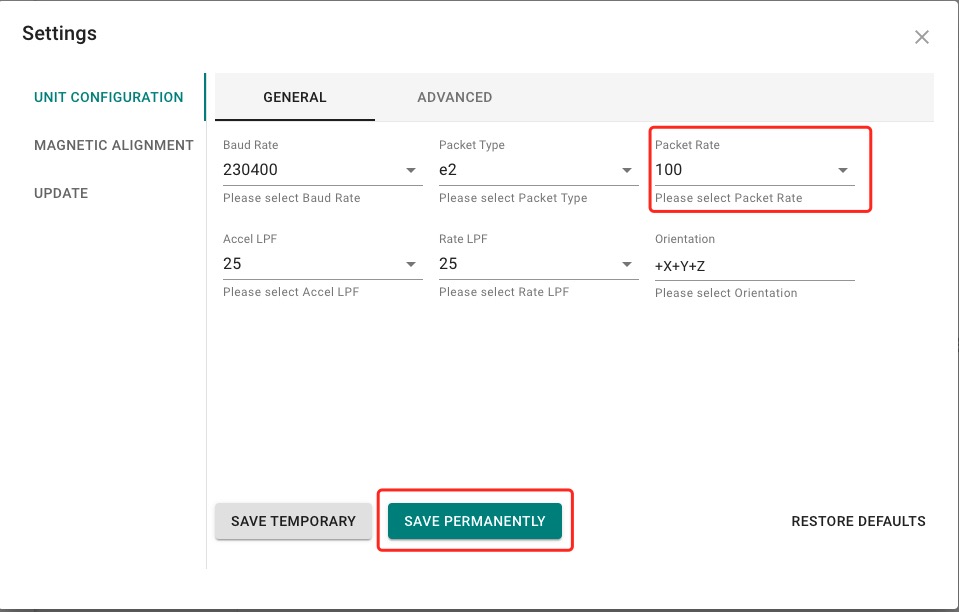
RE: OpenIMU300RI - Settings Permanently(Packet Rate)
posted in Product •
We have released new version of OpenIMU300RI firmware, it resolved this issue, please try it again.
RE: OpenIMU application release
posted in The OpenIMU Family •
About Question 1 and 2, I think you can confirm with our sales. There is a contact form for you to contact with sales. https://www.aceinna.com/inertial-systems/OpenIMU330B
Question 3. The latest update time of OpenIMU330BI IMU app is Feb-02-2021, we have corrected the update time on the popup window. Thanks.
RE: changing output_packet data in Z1 packet type using python without evk
posted in Product •
The z1 packet won't output roll and pitch unless you modify the source code with Aceinna open source tools.
There is another way for you get the roll and pitch.
Please follow below actions,
- Go to App Center to upgrade the application as OpenIMU300RI VG_AHRS 1.0.1
- Go back the IMU Monitor page, change the packet type to
a1ora2in the Popular Options. - Check the
Attitudeoption in Outputs.
Then you can get the roll and pitch plot on the page.
RE: I want to use my IMU383ZA-400 on ubuntu
posted in Product •
@sanjay-A Please use google chrome. Our python driver will establish a websocket server, and listen on ws://127.0.0.1:8000. And for Safari and Firefox, because of security policy, it will ignore the request of ws protocol if the web site is using https.
RE: I want to use my IMU383ZA-400 on ubuntu
posted in Product •
@Sanjay-Adkar if there is connected information from python driver, it stands the device can be detected. Then could you try one of below actions?
- Refresh the page.
- Click the chain icon on the right top of the page, then click refresh button.