@Dong-xiaoguang Thanks, the workaround works. However, as i mentioned before, when we use the ins algorithm to test long drive demon, the calculation of error_pos_algo includes the data set when the INS algorithm is initialized, and it is clear that just part of the data set leads to wrong position error.
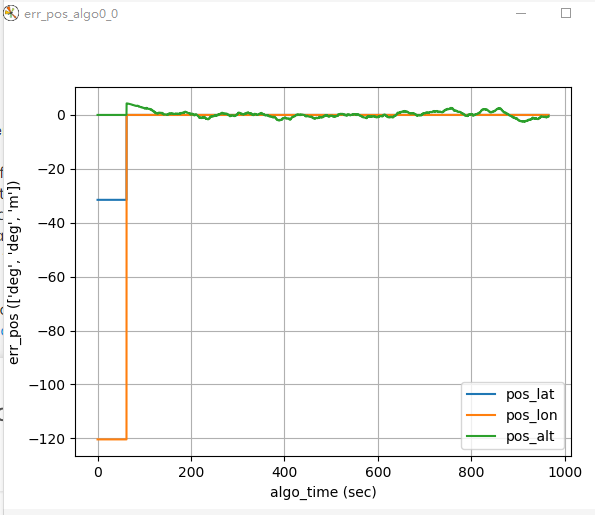
As a result, the part of the position error statistics in the summary of the simulation seems unreliable. The max error is the initial latitude and longitude we set in motion file, meanwhile, the Std of error is also unreliable.

I tried to manually delete the useless data generated during the initialization in the pos_algo0_0.csv and ref_pos.csv and recalculate the position error statistics by Excel, but the amount of data between pos_algo0_0.csv and ref_pos.csv is different. For the given demo, one is 24000+, and another is 193000+.
Honestly, i have no idea about how to match the data of the two files.
Could you give me some advice on this problem?
Besides, the unit of the simulation position of ins algorithm is [deg,deg,m], but the free_integration is [m,m,m], in my opinion, the latter is more suitable for analyzing the accuracy of simulation results.
I compared the aceinna_ins.py and free_integration.py in demo_algorithm file to find out how to change the unit of ins result, and found that free_integration import the geoparms from gnss_ins_sim.geoparams, i would like to ask if it is feasible to change the unit by modifying the aceinna_ins.py using related earth parameters.
Thanks a lot for your patience with me.