Hi,
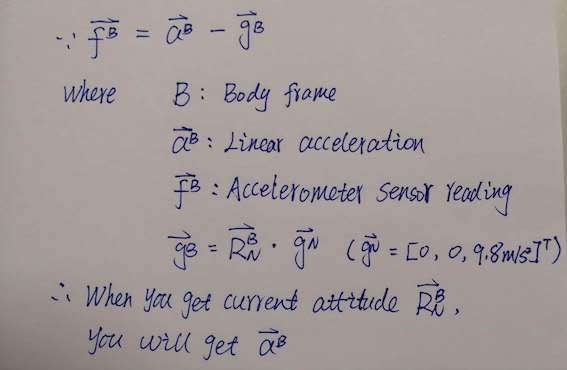
I plan to use the openIMU300RI in a car application. Therefore i need the linear acceleration.
I already installed the VG_AHRS framework and mapped the EKF data to the CAN output.
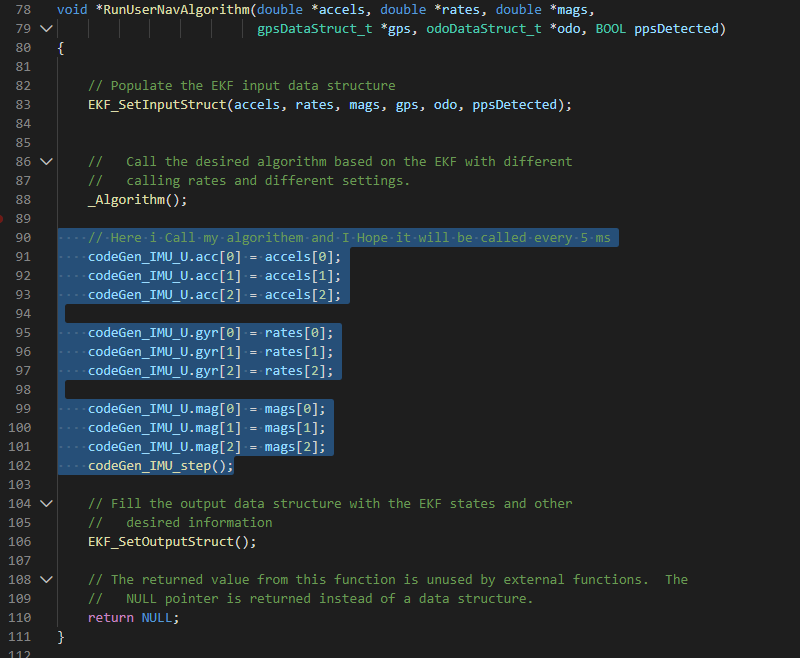
Unfortunately I don't know how to access the linear acceleration or how to activate the correction.
I can process the data received via CAN Bus but this is only 100 Hz. I would prefer the sensor to pre-process and output the data.
I hope somebody can help me.