@ysong when doing the mag aligment I'm stuck in this screen.
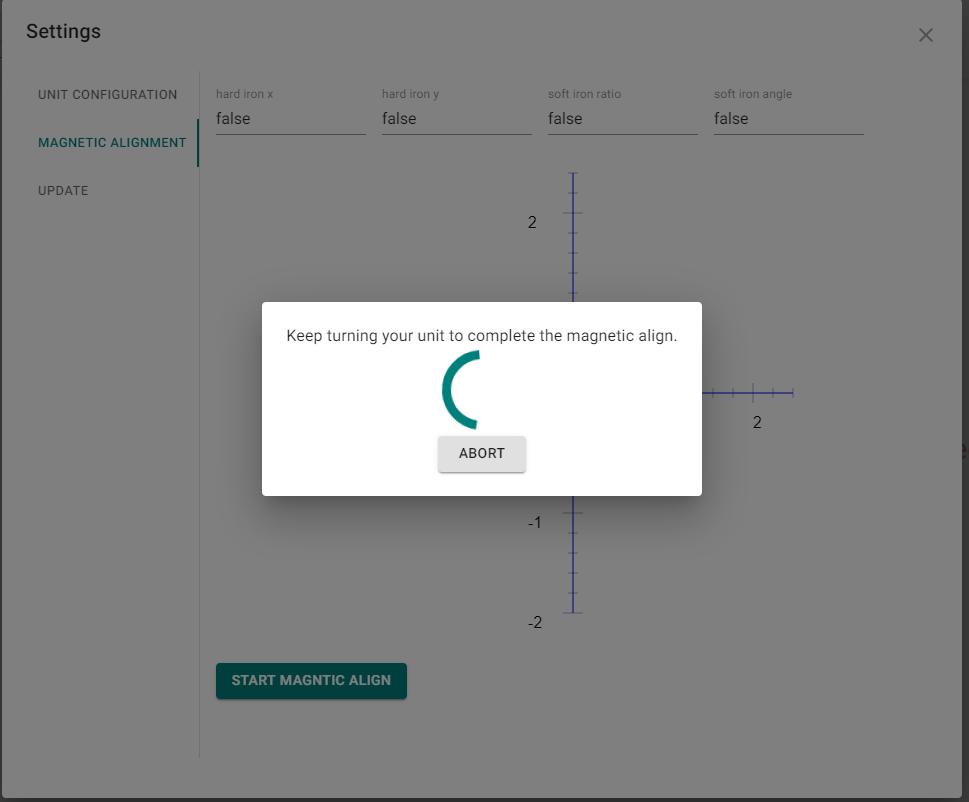
Do you have any idea how to fix that?

SeppW
@SeppW
0
Reputation
9
Posts
1061
Profile views
0
Followers
0
Following
Posts made by SeppW
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
@ysong said in openIMU300RI how to get linear acceleration:
BTW, magnetic sensor is sensitive, so for your car application, I think the iron part (such as engine, car frame) of your car maybe interference for magnetic sensor, so it it necessary to evaluate only use magnetic sensor to get heading is stable enough for your car application.
I'm aware of the problems which can occur due to iron effects. We just need the magnetic field to get an rough estimation of the direction of the car.
The more precise measurement will be done after identifying some characteristic landmarks. The IMU will be used to initialize this procedure.
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
@ysong I would love to get the data via CAN with 200 Hz but since I can deploy matlabcode via codegen on the IMU itself there is no need to.
I'm not to familiar with RTOS so i don't know how to set the user algorithm to run with 200 Hz.
My code needs to be called every 5ms with new data. I just added my algorithm call in the same function as the ahrs function call.
Like so:
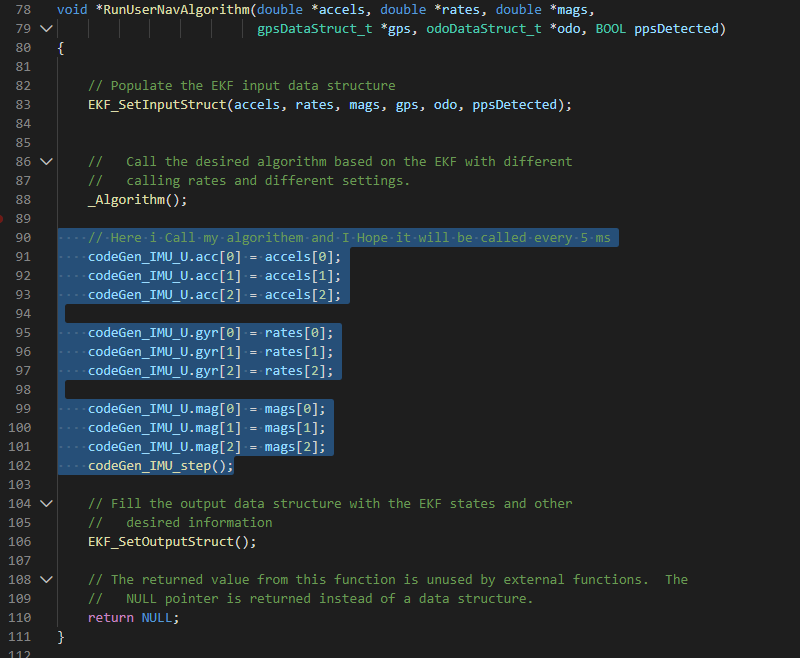
I'll try the calibration tomorrow. But I have not been able to calibrate the sensor. Python drivers is running, at least I think so. Is there a way to check that?
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
Short update:
I calibrated the sensor using recorded raw data.
Further I read the ?factory calibration? parameter with the nav-view tool.
I entered these values in the user_configuration.c but I'm not sure, if they are actually used.
Further I did a calibration on my own and now the matlab ahrs gives reliable heading estimation using the mag.
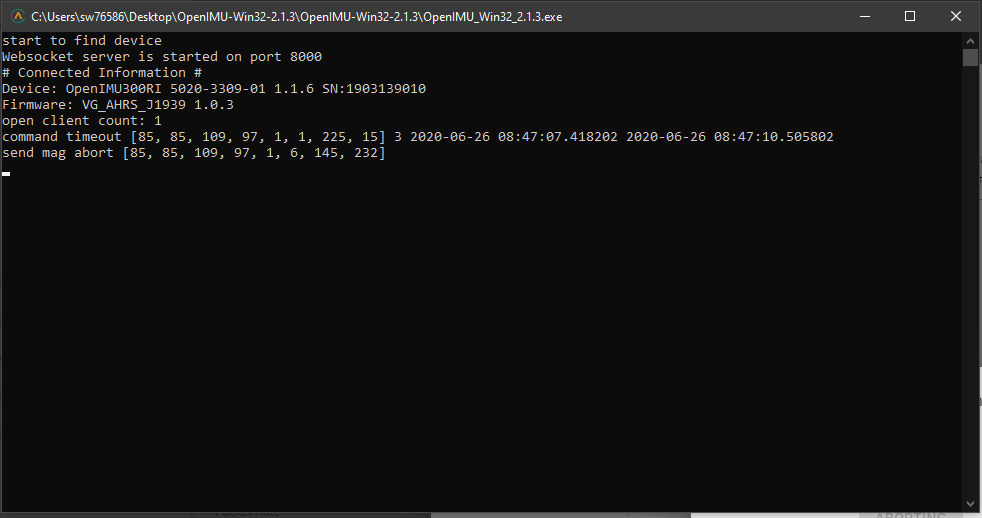
I'm wondering why the mag alignment using the NAV-View Software ist not working. This could be an easy why to calibrate the sensor when it is mounted in the car. -> When I start the app in NAV-View it just does nothing.
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
I was able to use generated matlab code to filter the gravity from the body acceleration.
It worked pretty flawless, but I'm wondering how to set the call cycle. My algorithm has a void step function which has to be called every 5ms.
Further I'm wondering whether the mag data are already corrected. I think the sensor I factory calibrated but I'm getting strange values by doing for example a 90 deg turn. The measured angle is like 60 deg and the integration of the filtered gyro gives me about 90 deg.
The 60 deg result in using a ahrs framework. I'm not sure why this is happening... I'm wondering if this is due to not using the calibration.
Also what does the soft iron values mean and how to use them?
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
@ysong Thank you for you reply.
I'm aware of the math. My easy approach would be to use the rotationmatrix form the quatanionsystem and tranform the acceleration to the world frame acceleration. Then I would simply remove the gravity and retransform it to body frame by using the inverse.
However I just wanted to make sure, that I'm not missing something.
Is it possible to install the INS app without gps and use the linear acceleration?
openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
Hi,
I plan to use the openIMU300RI in a car application. Therefore i need the linear acceleration.
I already installed the VG_AHRS framework and mapped the EKF data to the CAN output.
Unfortunately I don't know how to access the linear acceleration or how to activate the correction.
I can process the data received via CAN Bus but this is only 100 Hz. I would prefer the sensor to pre-process and output the data.
I hope somebody can help me.
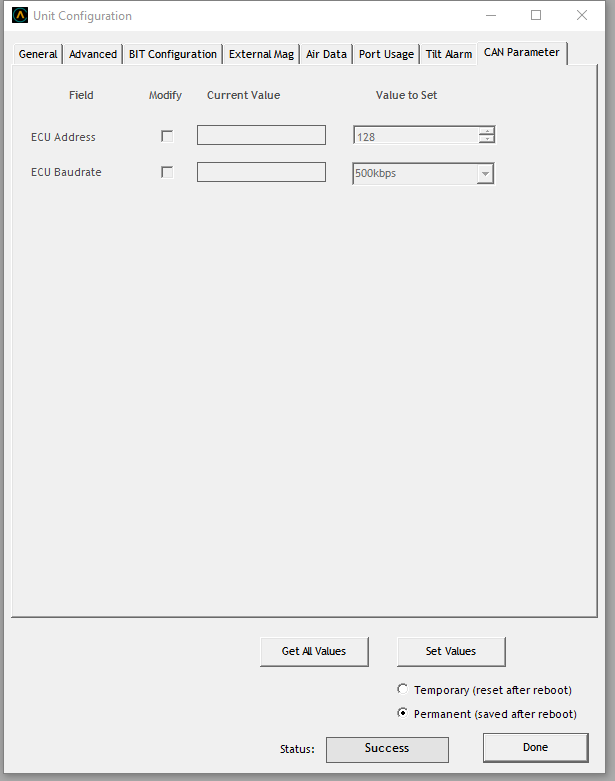
RE: openIMU300RI Can't change CAN Buadrate
posted in The OpenIMU Family •
I found a solution. But it is not as easy as changing a setting in a gui.
In the user config is a definition called ".ecuBaudRate= _ECU_250K" (Open an example repo e.g. VG_AHRS_J1939 in VSC).
Search for that and change it for example to _ECU_500K.
Then build and flash the firmware with the NAV View Tool.
openIMU300RI Can't change CAN Buadrate
posted in The OpenIMU Family •
Hi,
in the NAV-View Software the CAN Parameter settings are grayed out and i don't know how to change the CAN Baudrate.
Its this fixed in the 300RI or do i just have to change something?