Hi @Elie-NTUMBA, as I know there is no magnetic sensor in MTLT305D. I am a bit curious how you apply magnetic alignment?

ysong
@ysong
2
Reputation
27
Posts
1573
Profile views
0
Followers
0
Following
Posts made by ysong
RE: Set the magnetic alignment via CAN (RawCAN or J1939)
posted in MTLT305D •
RE: Big drift in openIMU300ZI yaw angle
posted in Product •
Hi @Abdelrahman,
- Please use AHRS application in low distortion magnetic environment, as mag sensor is very sensitive to magnetic interference.
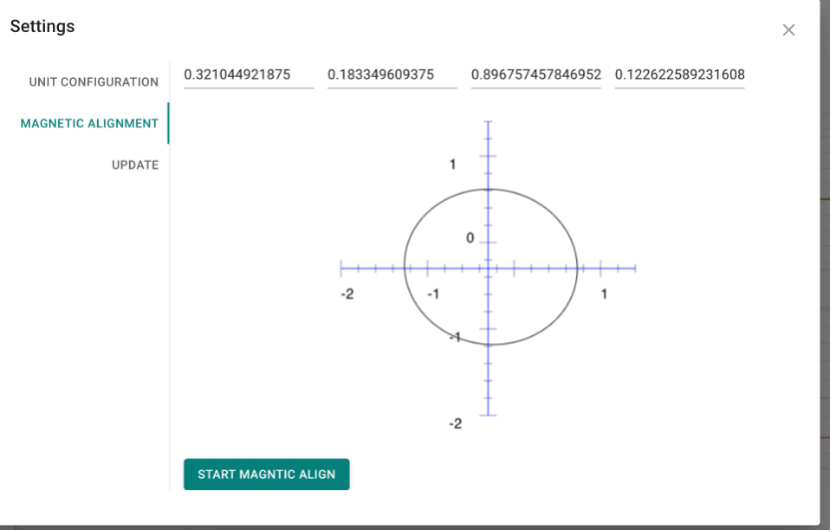
- Please apply magnetic alignment (as below screenshot) in no magnetic distortion environment at first and check if initial heading is correct.
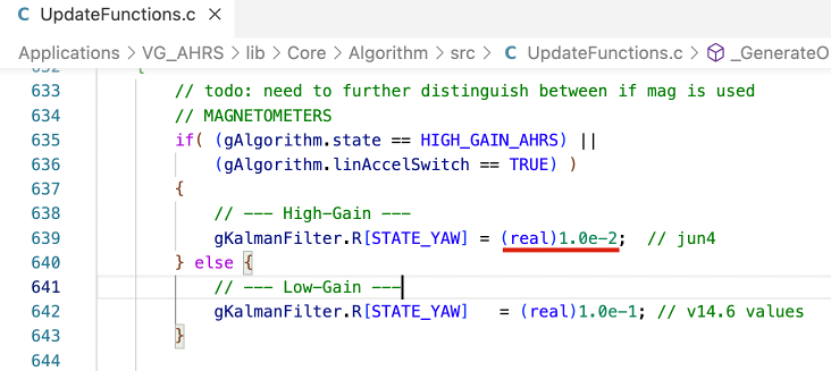
- If it takes long time to convergent correct heading in static condition, as AHRS is an open-source app, customers could try to adjust “gKalmanFilter.R[STATE_YAW]” (as below screenshot) to lower values, like 1.0e-3, 1.0e-4, 1.0e-5 … in their customized applications.
- Could you help to collect some field test data? This might require using a custom FW to collect all the information required for the algorithm to do post analysis. Test data should include accel, raw gyro, raw mag, corrected mag data, roll, pitch and heading data at 100Hz message rate from power on, as well as hard and soft iron parameters shown in above screenshot.
RE: openIMU on the boat
posted in The OpenIMU Family •
Hi Amin,
Roll and pitch are zero before algrithm initlization is done. Normally, algrithm initlization can be done within 1 second. Initial roll and pitch are calculated by averaged 3D acceleration. If you want to modify duration of algrithm initlization for your application, you can adjust 'INITIALIZE_ATTITUDE_DURATION' in source code. Thank you.
RE: Increasing angular rate data range on OpenIMU300RI
posted in The OpenIMU Family •
Hi, it is claims that the angular rate range is +- 400 dps in datasheet. I think the range was 400 dps in default IMU App before you updated to VG_AHRS App, right?
Assuming you check data in 'a1' or 'a2' packet via RS232, could you please switch 'z1' or 's1' packet to see the rate range?
RE: necesito ayuda para decodificar datos del paquete de "a1"
posted in The OpenIMU Family •
Hi, from your screenshot, we can see "0X55 0X55 0X61 0X31 ... " at the beginning of data, where 0X5555 is the Preamble of packet, 0X6131 is the packet type 'a1'.
Besides, here is a description of 'a1' packet, hope it is helpful for you.
https://openimu.readthedocs.io/en/latest/apps/ahrs.html?highlight=a1#the-definitions-of-the-output-packets-of-the-vg-ahrs-app
RE: OpenIMU300ZI Data output rate unclear
posted in The OpenIMU Family •
Hi, I used 200Hz before and OpenIMU300ZI worked properly at that time.
Please note that if the length of packet is a bit long, you also need to adjust baud rate to 230400 or higher.
RE: IMU300ZI UART1
posted in The OpenIMU Family •
Pin 7 of IMU300ZI is SPI/UART Interface selector, could you please check you have selected UART by pin 7 already on your customer board?
Reference: https://openimu.readthedocs.io/en/latest/300ZI/pinout.html
RE: Error for include file
posted in The OpenIMU Family •
Hi @mbirley,
Please don't care the info in table 'PROBLEMS', just try to build the project.
I just built the project successfully as below picture.

RE: Power Supply needed for connection with Nav-View?
posted in MTLT305D •
Yes, you need to provide an external power (4.9 V – 32 V) , please refer to Table 3 in page 7, thank you!
RE: openIMU300RI how to get linear acceleration
posted in The OpenIMU Family •
Hi @SeppW ,
I find 300RI can't do mag align via serial port in current version, but can do mag align via CAN, so I have 2 suggestions(ways) for you:
- Implement 'mag align via serial port' function for 300RI. You can find how 300ZI to implement 'mag align via serial port' by searching key word 'ProcessMagAlignCmds' in 300ZI VG_AHRS project source code, and follow the steps of the implementation in 300ZI VG_AHRS. This is a 'DIY' way that play with 300RI. Welcome your coming contribution!
- Run mag align via CAN, please refer to: https://openimu.readthedocs.io/en/latest/software/CAN/CAN_J1939_SetCommandMessages.html?highlight=align#can-j1939-set-request-messages