Hi
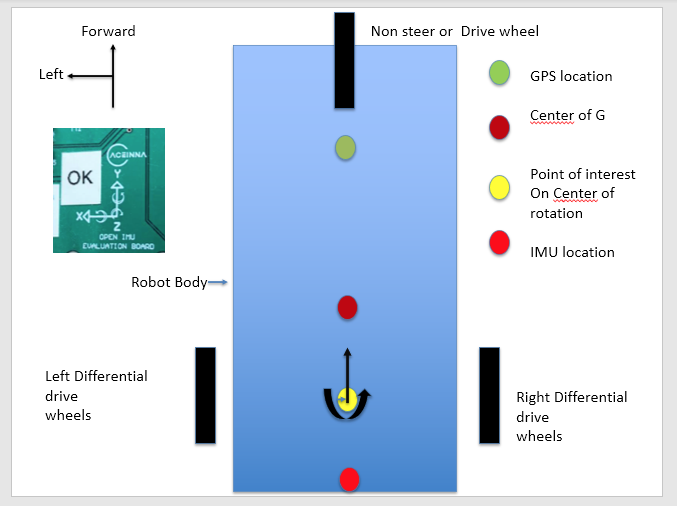
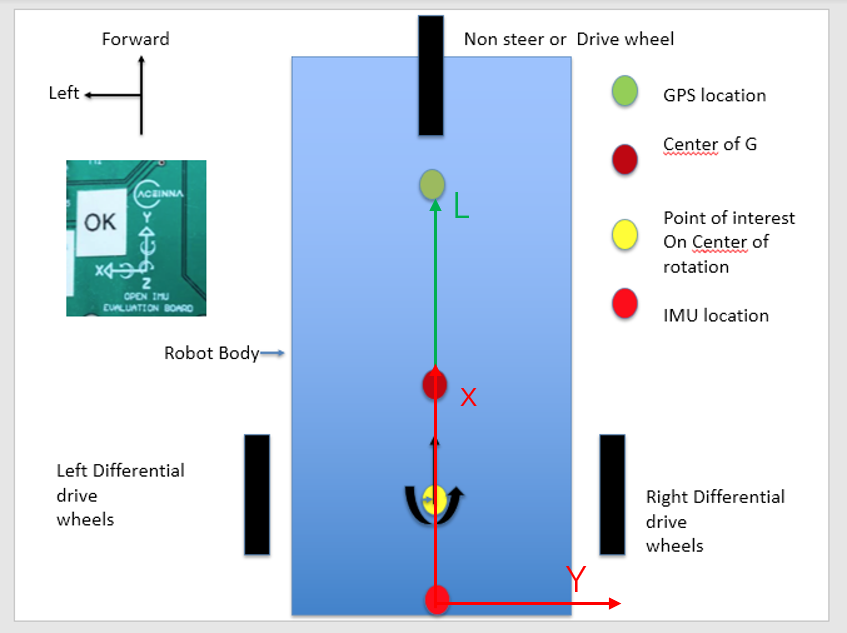
In userconfiguration you have these variables. I want to locate the variables used to define the offsets between the GPS antenna and the IMU. Are these the variables and what is their sense do you have a diadram ie what is the difference between - and + x and - and + y. Same for Z
with regard to orientation what would - signs do to the orientation ie do you have a diagram
.leverArmBx = 0.0,
.leverArmBy = 0.0,
.leverArmBz = 0.0,