
-
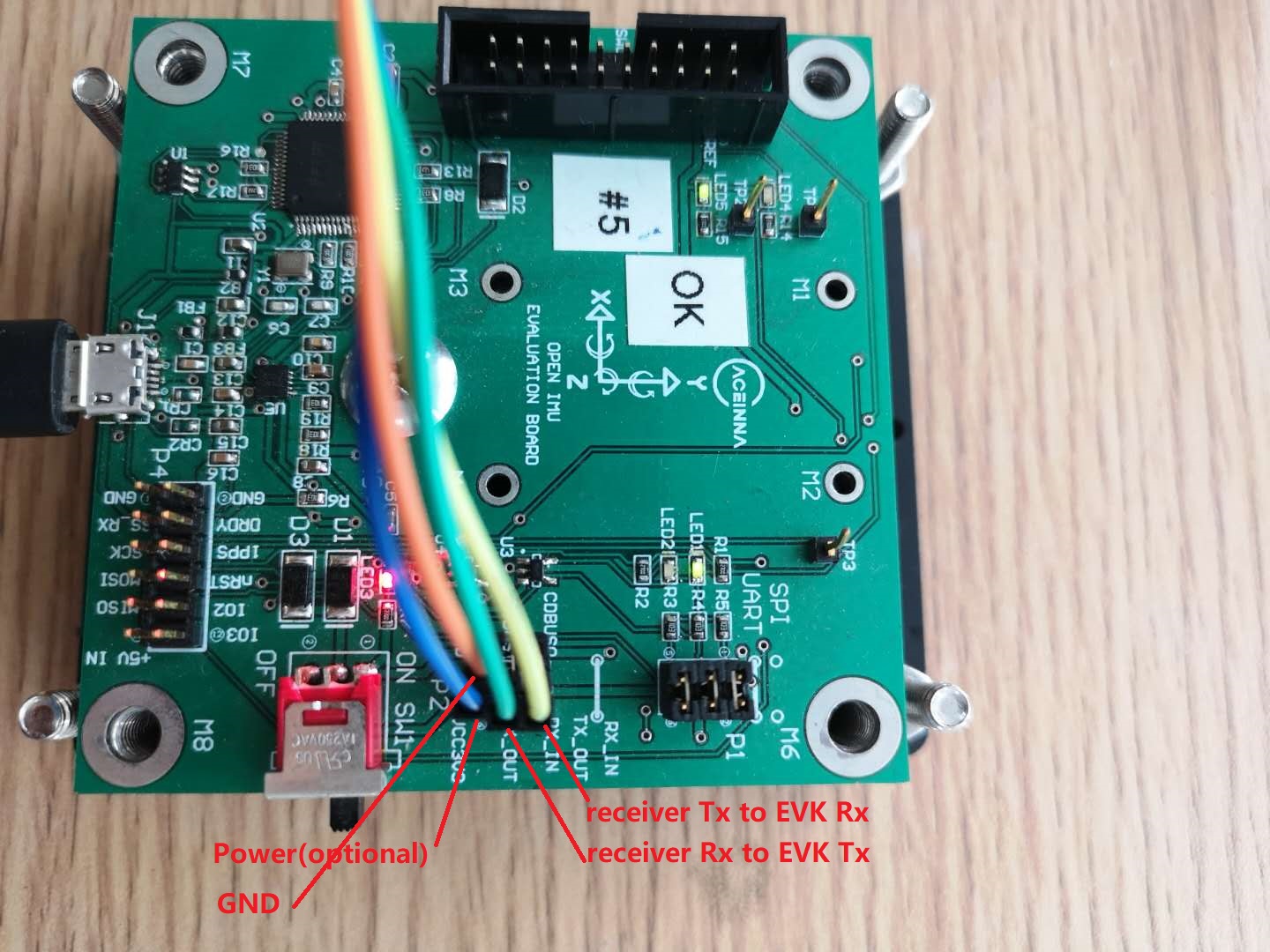
Please first confirm the GPS receiver is correctly connected to the EVK.
 .
. -
In TaskGps() in TaskGps.c, please track if it can run into GPSHandler()-->_handleGpsMessages(), and the data is decoded as desired, which is NMEA in you case.
switch(GPSData->GPSProtocol){
case NMEA_TEXT:
parseNMEAMessage(tmp, gpsMsg, GPSData);
break;
case NOVATEL_BINARY:
parseNovotelBinaryMessage(tmp, gpsMsg, GPSData);
break;
case UBLOX_BINARY:
parseUbloBinaryMessage(tmp, gpsMsg, GPSData);
break;
default:
break;
}
}
- Please notice, NMEA is not recommended because it lacks some required info.

{kind=link}