@cek
What do you think will happen if I push "Algorithm Reset" button on NAV-VIEW? Is that a bad idea?
(I've never pushed it)
Posts made by rintaro
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
@cek
Thanks for the instruction.
I'm not sure that "55 55 4C 45..." worked or not (is there any way to confirm the command was accepted?)
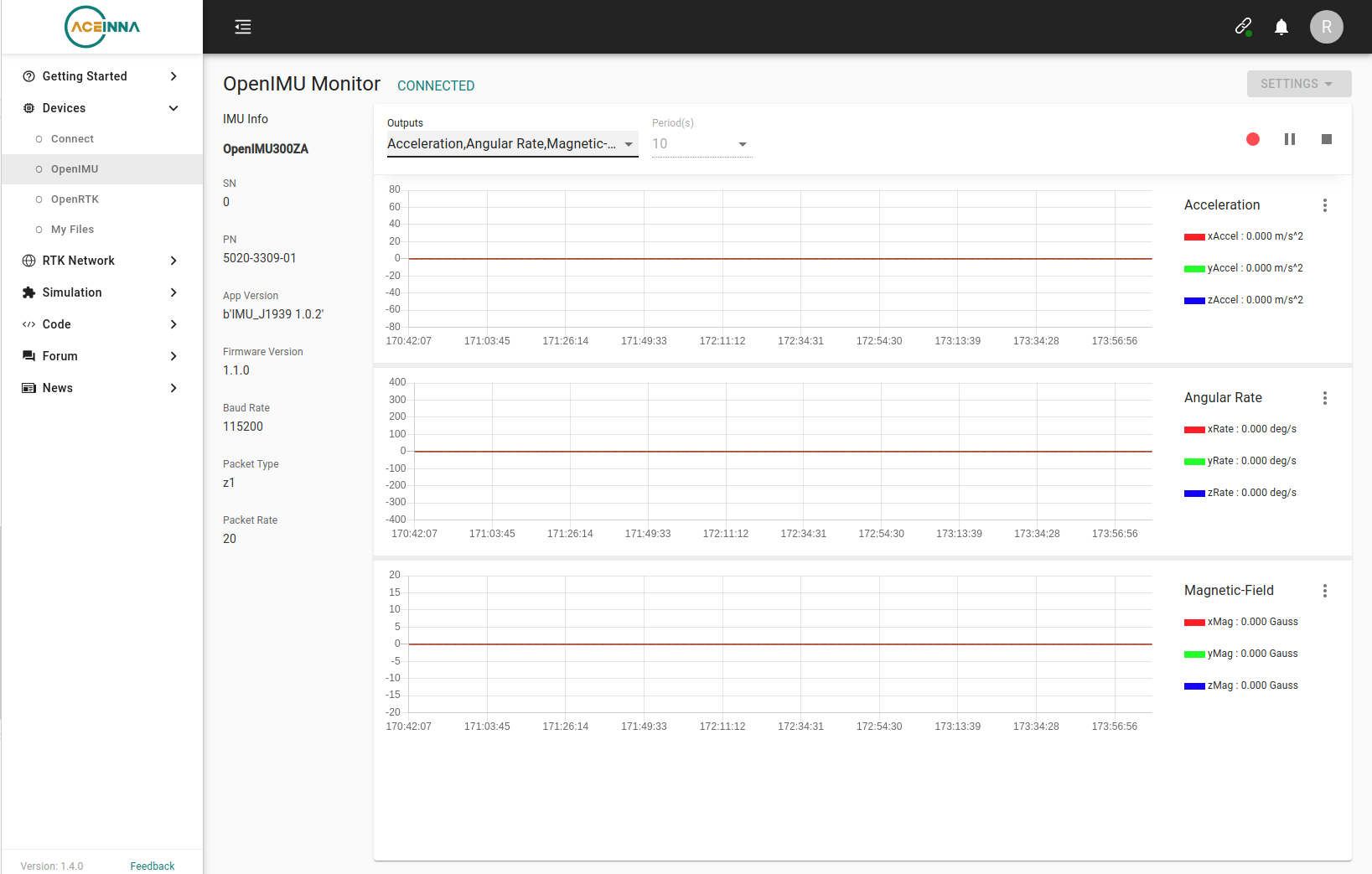
But anyway I can see all-zero-data on web interface now.
Is this your expectation?
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
@cek
Thank you for quick reply. I understand.
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
@cek
Thank you for your efforts.
Can I ask when you could give me what to do?
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
@cek
Sure. I wait for your solution.
Thank you for your job.
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
@cek
Another colleague who bought this IMU says that he saw some numeric data on NAV-VIEW,
but at the moment I received it, it didn't output any data.
I'm not sure what the missing link is.
Is there any way to completely refresh it to plant shipping state?
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
I followed your instructions, but the problem still remains.
How I updated firmware
- I downloaded your firmware(5020-....._plan.bin) and rename it as new.bin
- I updated it by python-openimu driver.
~/hoge » openimu
This is openimu main routine.
Find device 0 times
system ports detected ['/dev/ttyS0', '/dev/ttyUSB0']
Autoconnected by last saved port
Connected(port:/dev/ttyUSB0 baudrate:57600) ....OpenIMU300ZA 5020-3309-01 1.1.0 SN:0
>>ls
Usage:
help : CLI help menu
exit : exit CLI
run : Operations defined by users
save : Save the configuration into EEPROM
connect : Find OpenIMU device
upgrade : Upgrade firmware
record : Record output data of OpenIMU on local machine
stop : stop recording outputs on local machine
server_start : start server thread and must use exit command to quit
get : Read the current configuration and output data
set : Write parameters to OpenIMU
>>upgrade new.bin
False
upgrade fw: new.bin
Restarting app ...
Find device 0 times
system ports detected ['/dev/ttyS0', '/dev/ttyUSB0']
Autoconnected by last saved port
Connected(port:/dev/ttyUSB0 baudrate:57600) ....OpenIMU300ZA 5020-3309-01 1.1.0 SN:0
How it looks now
- I executed
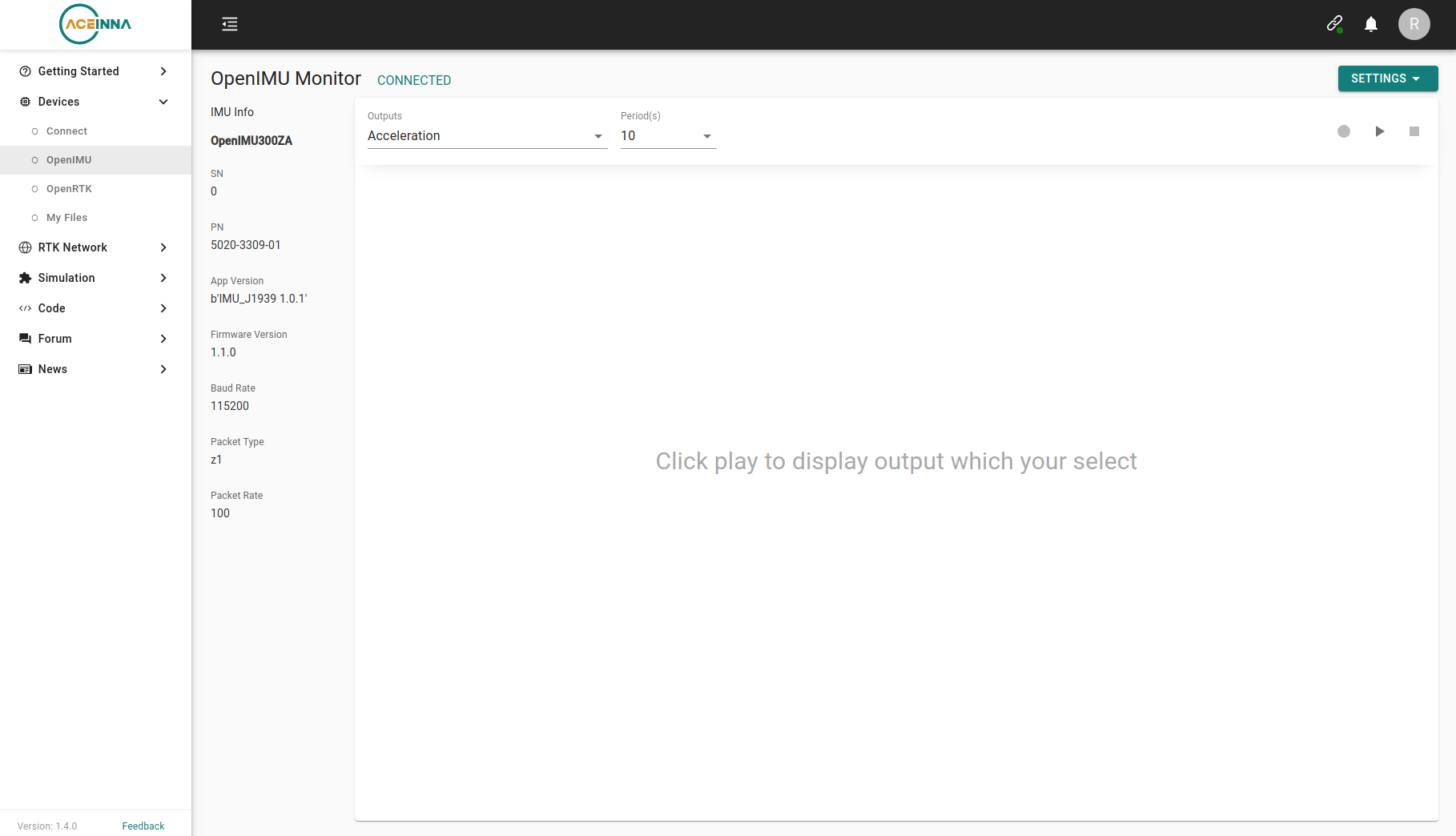
server_start - I opened web interface
- I changed packet rate via SETTING -> Unit Configuration
Configuration looks good because openimu-driver says as follows.
>>server_start
>>Successfully Updated
But no data are shown.
I also tried baudrate 57600 but nothing changed.
I'm waiting for your advice!
Thanks.
P.S. As I mentioned, I pushed "Software Reset" button in NAV-VIEW when I was trying to figure out why I couldn't get any data.
RE: VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
@cek
Thank you for your quick support!
"the installation" means installing VG AHRS 1.0.1 for OpenIMU300RI.
Before installing it, the IMU doesn't output any data such as acceleration, gyro.
After installing it, the IMU has started to output data but all the data are 0.
I'm sure that I downloaded VG AHRS app for 300RI.
Anyway, I'll try your instructions. Thank you!
VG AHRS 1.0.1 for OpenIMU300RI doen't work!
posted in The OpenIMU Family •
Device
- OpenIMU300RI

What I did
- I installed the following apps which was obtained from App Center early this week.
- VG_AHRS 1.0.1
- IMU Application 1.0.2
- I tried installation via both NAV-VIEW on Windows and Python driver on Ubuntu

Before the installation, the device seemed to be always BOOTLOADER mode and
I couldn't get any data.
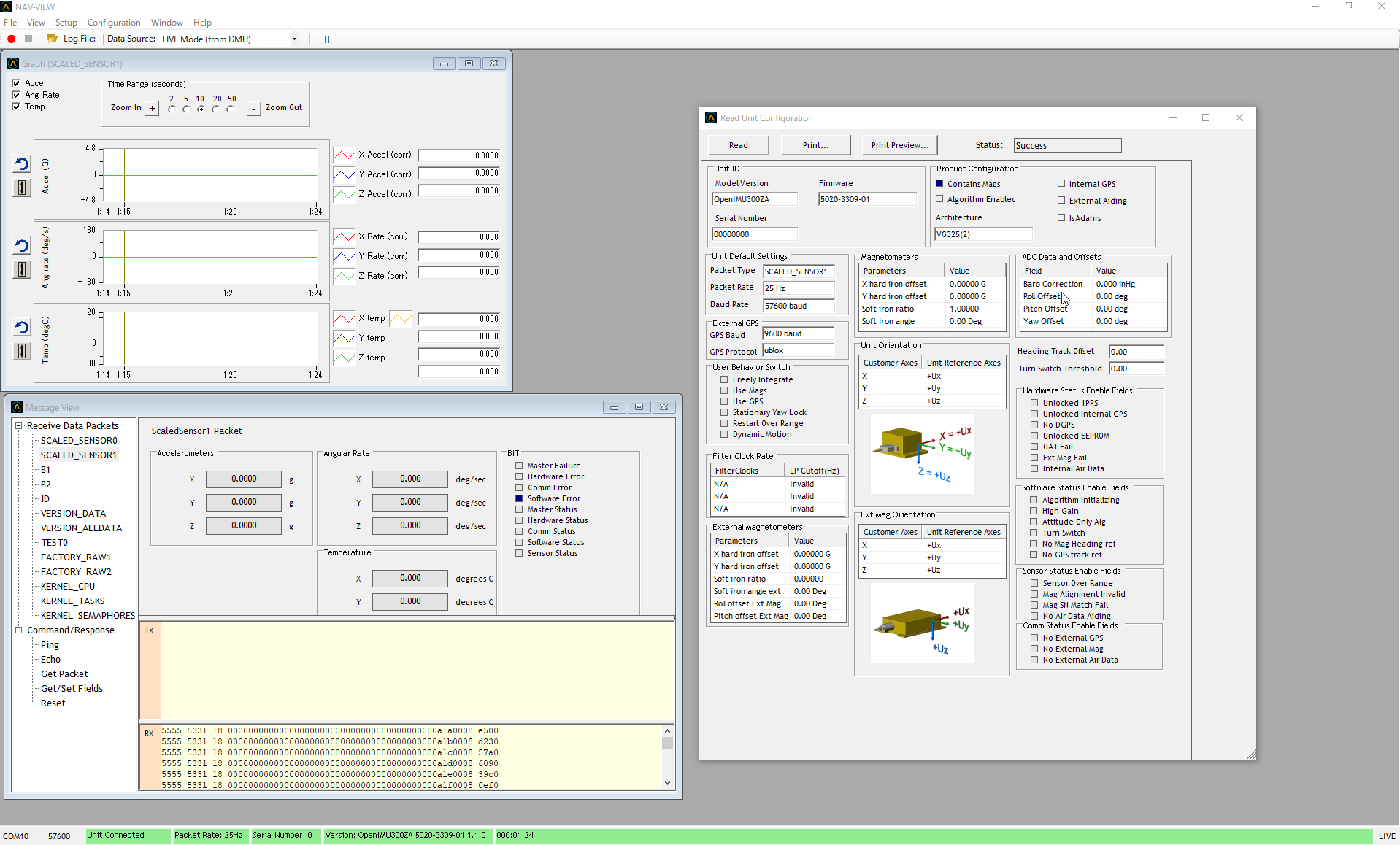
I pushed "Software Reset" button on NAV-VIEW at the time.
Problem
- After the installation, the device is recognized as wrong one: OpenIMU300ZA
- Obtained data is always zero.
- "Software Error" flag seems to be active.
What should I do to fix them? I'm seriously in trouble at work.
Thanks.