Dear all,
i want to run the INS APP but most of the times the NMEA messages are not seen by the openimu and so there isn't position available.
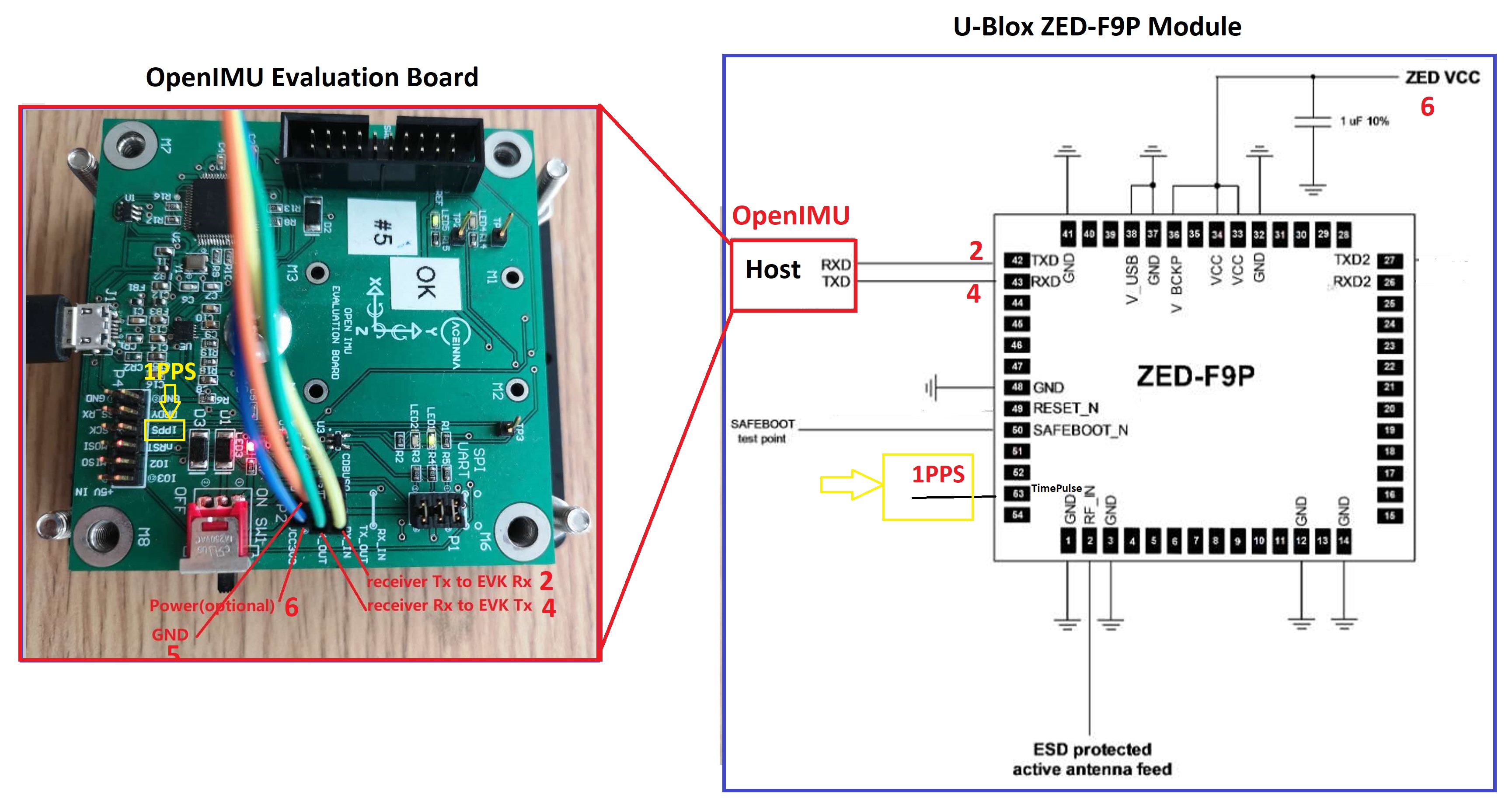
I have the openimu 300ZI eval kit, u-blox zed-f9p and pc running ubuntu 18.04 with u-center 20.01 and vscode.
My procedure is the following:
- everything is connected in the right way because sometimes i was able to let it work (so, if the connection was incorrect i would never get position in aceinna navigation studio)
- i connect ublox to pc and i set in ucenter the required NMEA messages to output on UART 1 (RMC, GGA, VTG);
- i open vs code (build the app, upload it to openimu board);
- run openimu (once connected with cli i can see all the parameters included those for gps);
- if i type record it writes me a csv file with the columns of GPS position all 0;
- if i run python webserver.py and i open aceinna navi studio in chrome it has the same behaviuor (works everything but no position from gps);
I can't figure out why sometimes it works and sometimes not; i always do the same procedure.
I'm a little bit confused.
Con anyone help me?
Thanks
Matteo