OpenIMU300 数据读取:
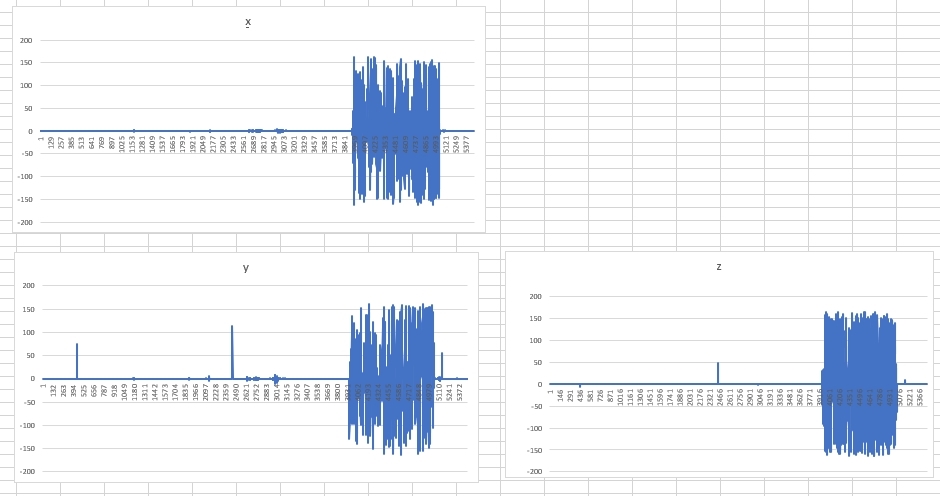
1.通过STM32 MCU SPI方式, 200HZ读取数据,读取数据的寄存器是0x3f(数据块包含 STATUS+ 陀螺仪+加速度+温度+磁场)
2.读取数据后发现陀螺量程不正确,快速转动超过80dps后数据错误,如下图所示
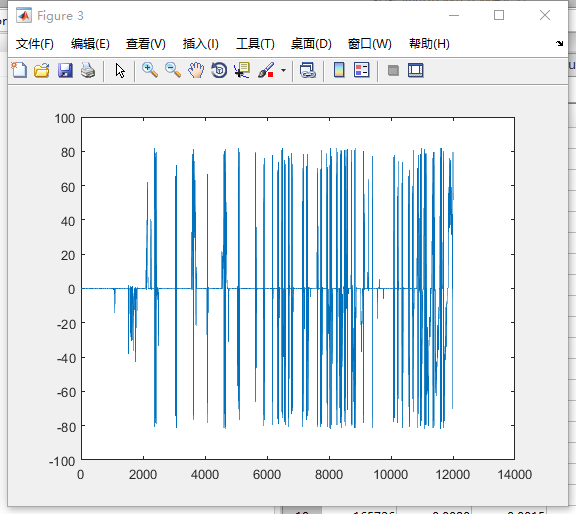
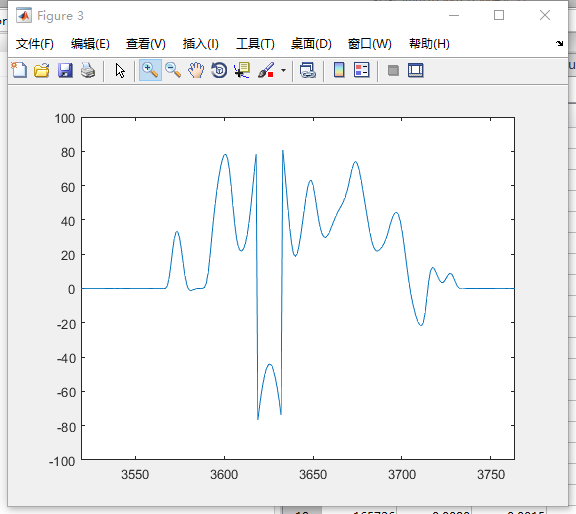
The Gyro range of OpenIMU300 is below 80dps?

you can refer to link: https://openimu.readthedocs.io/en/latest/software/SPImessaging.html
we will test it in our side and feedback to you
Hi GuoCh,
参考上述文档,另外请问下 firmware 版本是多少? 可以用 https://developers.aceinna.com/connect 中工具获取。
@Li-YiFan 好的,我在参考文档检查程序,固件版本是这样的,你看下对不对
autoconnected
Connected ....OpenIMU300ZA 5020-3885-01 1.0.40 SN:1908400175
你测试的是我们GIT上的唯一SPI_OPEN300的版本,@Li-YiFan 链接是(我们放在GIT上的测试SPI版本): https://github.com/Aceinna/openIMU_BETA/tree/master/OpenIMU300ZA/IMU
Hi GuoCh,
0x3f, 0x3e的burst read我这边都没有复现你的问题,量程在正常范围内,80dps并不是最大量程。
 目前OpenIMU300ZA的SPI相关测试固件在Github上有测试版本源码,可以参考:https://github.com/Aceinna/openIMU_BETA/tree/master/OpenIMU300ZA/IMU
目前OpenIMU300ZA的SPI相关测试固件在Github上有测试版本源码,可以参考:https://github.com/Aceinna/openIMU_BETA/tree/master/OpenIMU300ZA/IMU
另外, 你可以做以下操作
1.确认模块是否正常。
可以使用我们开发者网站,https://developers.aceinna.com/, 下载 https://developers.aceinna.com/connect 中的工具,刷下https://developers.aceinna.com/apps 中的APP, 然后从串口看下gyro数据,能否复现量程问题,从而确认模块本身是否有问题。
2.确认你host端代码是否正确,可以参考我们githu上代码。
https://github.com/Aceinna/python-spi
3.确认你烧写的固件是否正确(用STlink 从起始地址 0x0801 0000 开始烧写)
OpenIMU300ZI_SPI_2.bin