OPENIMU300RI / Mtlt305D are always used in vehicles such as cars and tractors via CAN interface, so the RS-232 messages are QUIET by default.
Nav-view software can help you configure unit to send messages via RS-232 interface:
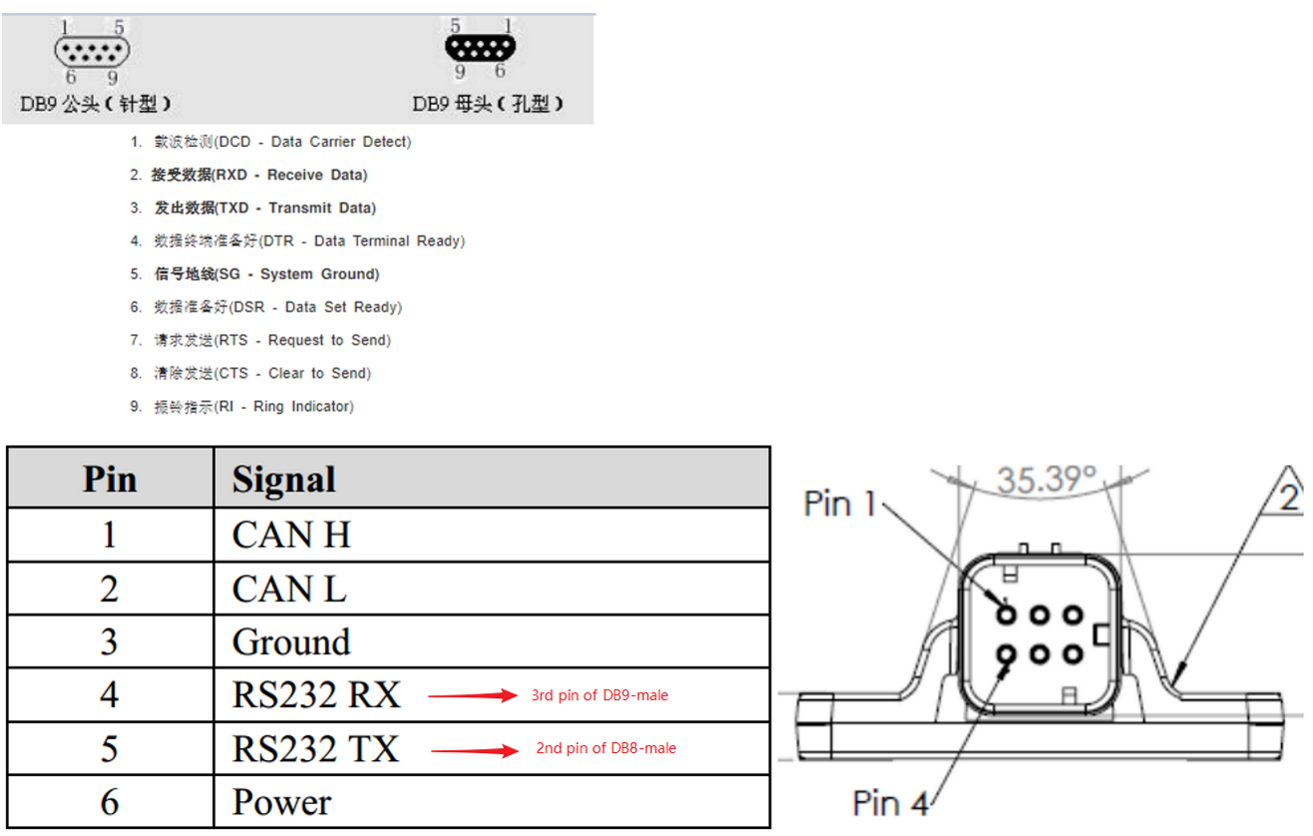
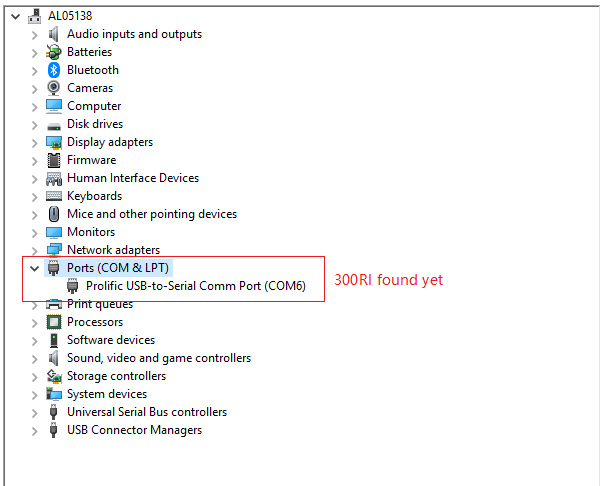
- Connec unit and PC with a RS-232 to USB cable.
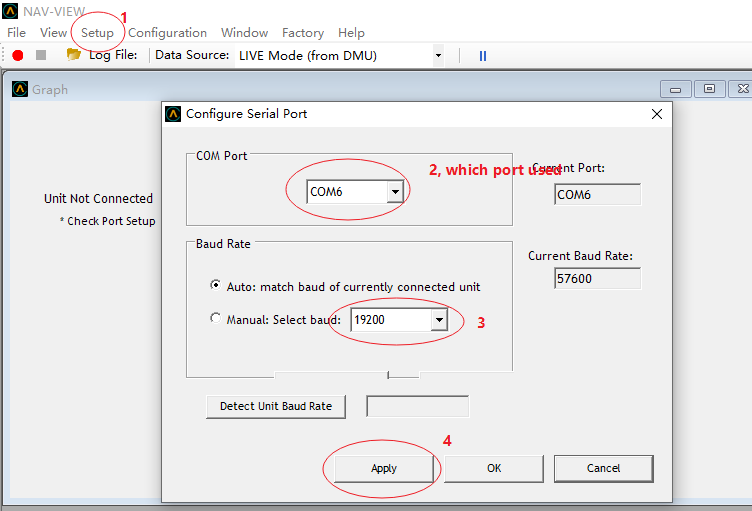
- Open Nav-view, it can scan all available COM ports and try some usual baudrate, then connect unit automatically. If the bottom of GUI become green, it means Nav-view has connected with unit successfully, rather, if it is red as below picture, it means hasn't connected. You can try to replug usb port or re-open Nav-view.
- After the unit connect with Nav-view successfully, you can configure the output rate in configuration sheet.

If the unit can't connect with Nav-view:
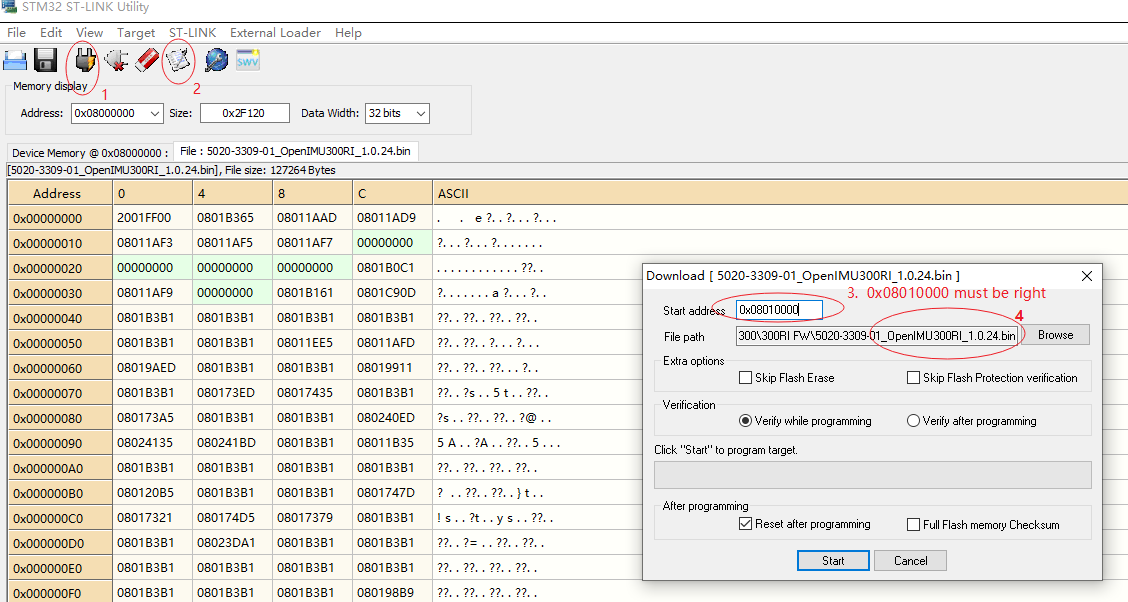
- Could you please tell me which sample code or application bin you downloaded to unit, it is better to provide a screenshot.
- Could you please try to receive messages via CAN? Unit outputs messages all the time. So we can make sure the unit is still alive after you upload bin/firmware last time.
Thanks.


-jybyyrfn.jpg)