Thanks for the soon reply.
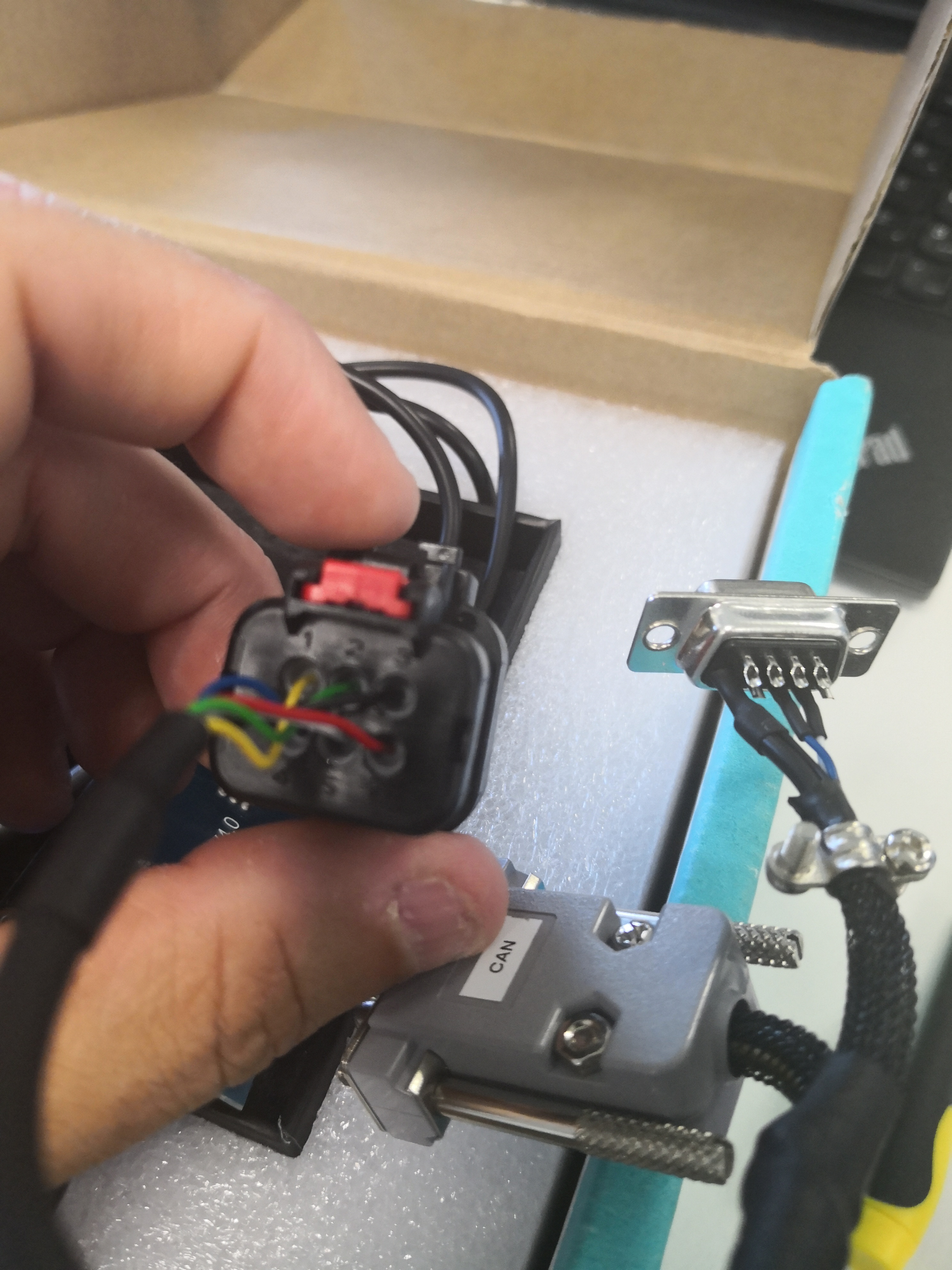
Connection wires were provided by Aceinna, I have open the RS232 one and seems to be properly connected:
Thanks.
David

Thanks for the soon reply.
Connection wires were provided by Aceinna, I have open the RS232 one and seems to be properly connected:
Thanks.
David
Hi:
I have swapped blue and white wires.
Still does not work, same error using pyton driver. NAV_VIEW also is not able to detect the IMU,
Thanks.

OPENIMU300RI / Mtlt305D are always used in vehicles such as cars and tractors via CAN interface, so the RS-232 messages are QUIET by default.
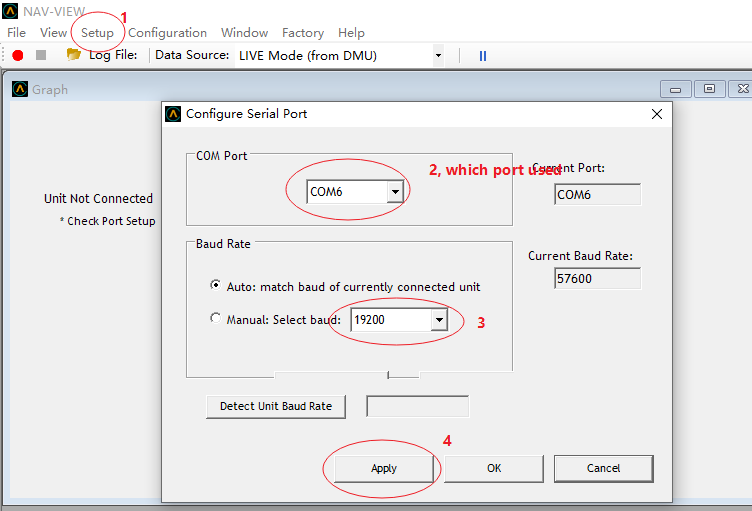
Nav-view software can help you configure unit to send messages via RS-232 interface:

If the unit can't connect with Nav-view:
Thanks.
Thanks for the quick response. Unfortunately I have tried to connect using NAV_VIEW in automatic mode and in manual mode. No response at all.
I have to units, an EVK and a standard 300RI (without the evaluation Kit). Today I have tried to connect the standard 300RI unit with the same results. No connection.
I think my problem is more related with software? But i have tried in two different computers and in both cases the pyton executable (pyton server.exe) was not able to connect to any of the two units. In WIN7 64-bit I receive a message from the app but in W10 the app says that is trying to connect to the specific port but never connects. No error messages.
Maybe there is a problem with the wire provided ? The 6 pin one that connects to the RS-232/CAN. As i have been able to connect via JT2 and upload software to the unit successfully. Seems that the problem could be between the unit and the computer.
Are there any tests that I can do using a Digital Multimeter to ensure that the 6pin connector/RS-232 is working properly?
Thanks
David

@david i think it is still connection problems, pls check 2 points again:
how about your status now?
Thanks for the response. I am busy with other tasks and haven´t time to continue with the IMU unit.
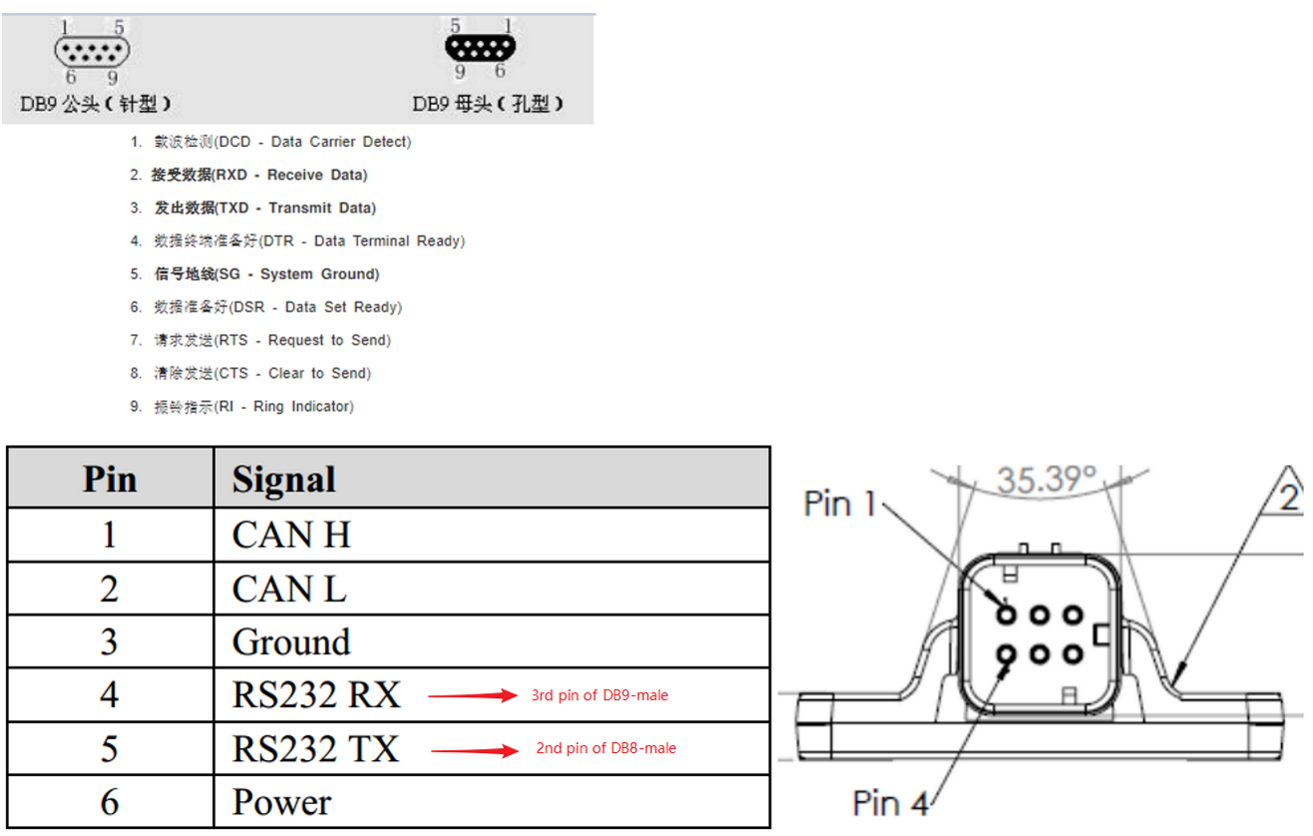
I will check if there the wire connections are correct, by checking with a digital multimeter the RS-232 pins and the 6-pin connector. I will check for electrical continuity.
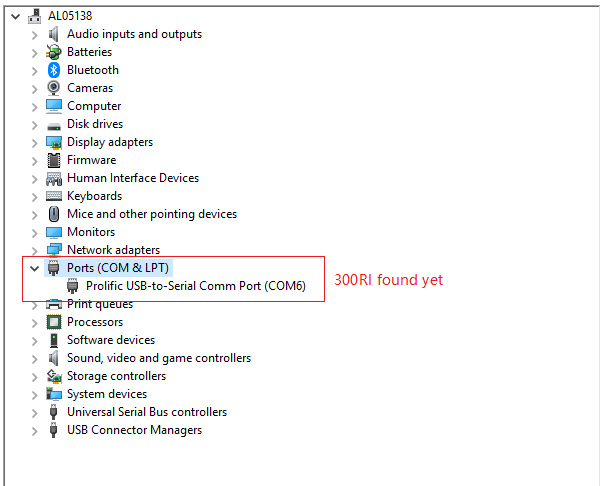
When I connect the device to my computer, in the devide management I always see that something is connected. Furthermore when I connect the IMU, the pyton.exe looks properly in the COM ports where the IMU is connected.
Thanks. I´ll let you know.
This is being a nightmare, I have checked for continuity between 6pin conector and DB9 pins and was OK.
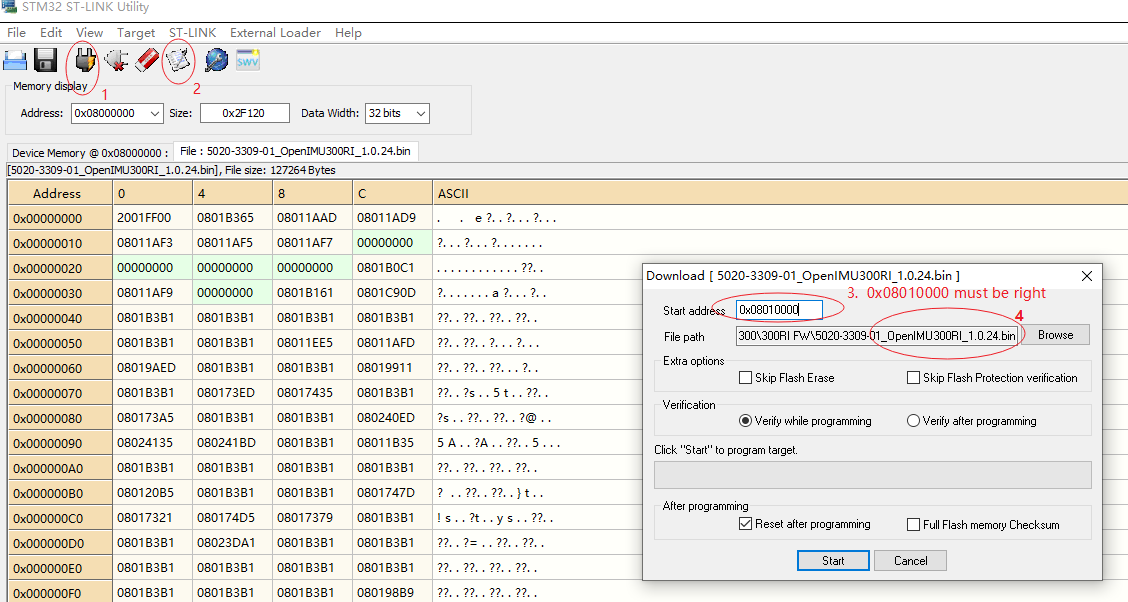
Please see the next picture: I have build and then upload a project (imported example). Its OK. isnt it?
-jybyyrfn.jpg)
After that I disconnect all wires (except external DC) and connect the 6 pin -rs232 to my rs232 to usb cable. I connect, the device is properly recognized (the computer beeps). And again the same problem. Neither NAV-VIEW nor pyton detects the IMU sensor.
I am getting crazy with this sensor.
Thanks
David
Found the problem. The RS-232 to USB conversor wire was broken or did not work properly.
I have used a computer with a standard RS-232 port and the software works properly.
Thanks to all for your support.
We have tested our MTLT305D directly connected to a PC and was working. We have a data logger CANedge2 and tested both channels are working since we managed to power it up and a USB connected to the CH2 was powered by it. Now my query is how to configure the MTLT305D to connect to this data logger? Can anybody help me on this please.
Thanks.
@JimmyEG you mentioned "We have a data logger CANedge2 and tested both channels are working ", already connected, right? so not understand your request.
pls complement: