If you disable the mode , and you set a baud , you can only work at this baud. after it come back message , please send another time(: ID(hex):18EAFF00 DATA:00 FF 59.) the feedback ID should contain "FF59"
Posts made by zrs
RE: OpenIMU335RI - Change CAN Baudrate with NAV-VIEW
posted in OpenIMU335RI •
RE: OpenIMU335RI - Change CAN Baudrate with NAV-VIEW
posted in OpenIMU335RI •
@F-Weber ,You should now be in automatic baud mode. To set the baud rate of CAN, disable automatic baud rate。
I suggest using CAN. First you send this extension frame to 335RI: ID(hex):18EAFF00 DATA:00 FF 59. Then you send me the return message of this CAN message and I will tell you what to do next.
RE: Not Serial Com in OpenIMU 335RI
posted in OpenIMU335RI •
You can first check whether there is a corresponding serial port through the device manager of the computer. In addition, when NAVIEW is connected, is the indicator line at the bottom l green or red? If it is green, you can set the packet sending rate in the
unit configuration of configuration
RE: Not Serial Com in OpenIMU 335RI
posted in OpenIMU335RI •
@spacelabElectronic ,to connect the Studio, you should open the python driver first. This is the link : https://github.com/Aceinna/python-openimu/releases/tag/v2.6.1
If you just want to get data , you can also use the Naview , I have posted a Naview 3.5.12 file in the forum before, you can search it
RE: NAV-View CAN Parameter Unit Configuration
posted in The OpenIMU Family •
Which product do you use? Which firmware? We guarantee that the official release of the firmware is OK
RE: Read out protection on openIMU300ZI
posted in The OpenIMU Family •
@Amin ,We don't suggest you do that.
RE: interfacing live data to custom GUI
posted in The OpenIMU Family •
Hi @Lunytunes ,pls try the pythondriver -ubuntu : https://github.com/Aceinna/python-openimu/files/9313819/pythondriver-ubuntu.zip
RE: NAV-VIEW3 Unit Configuration CAN Parameter
posted in The OpenIMU Family •
@kfost Did you change the code of 300RI? Or you can try this naview: https://forum.aceinna.com/topic/350/nav-view-3-5-12
RE: Device Startup
posted in MTLT305D •
HI @Ties-Junge ,are you using the 305d? As far as I know, we don't have a calibration function. What kind of equipment are you using
RE: How does it work when I don't do anything for OpenIMU335RI?
posted in OpenIMU335RI •
@ShenYanTaoBeyonCa , There is no ahras data on openimu335ri, we only support VG data. The default data maybe a2 packet.
You can contact us here : https://aceinna.com/
RE: How to synchronize OpenIMU300ZI with external accelerometer?
posted in The OpenIMU Family •
Sorry, we don't have the function now
RE: Cannot connect OpenIMU300RI to my pc in the UART RS232 bus
posted in The OpenIMU Family •
Hi , @WasirWasHere
First, Webserver and NAviw can not be used at the same time,.
Second, make sure your TX,RX connection is correct (TX to rx).
Third you haven't modified the firmware, right?
RE: openIMU300za question of hardware
posted in The OpenIMU Family •
@luken Sorry, your EVK doesn't seem to be our product. If you want to use GPS function, please buy RTK330LA or RTK330LI. The supporting EVK of this product supports GPS function .
RE: OpenIMU300ZI
posted in The OpenIMU Family •
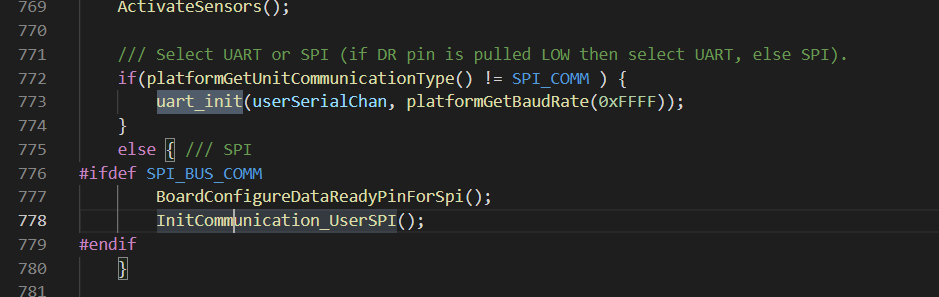
@Miroslav-Talasek ,It seems that SPI functionality is not fully implemented in the code,you can try to refine this function by writing the corresponding initial configuration code inside the InitCommunication_UserSPI( )
RE: openIMU300za question of hardware
posted in The OpenIMU Family •
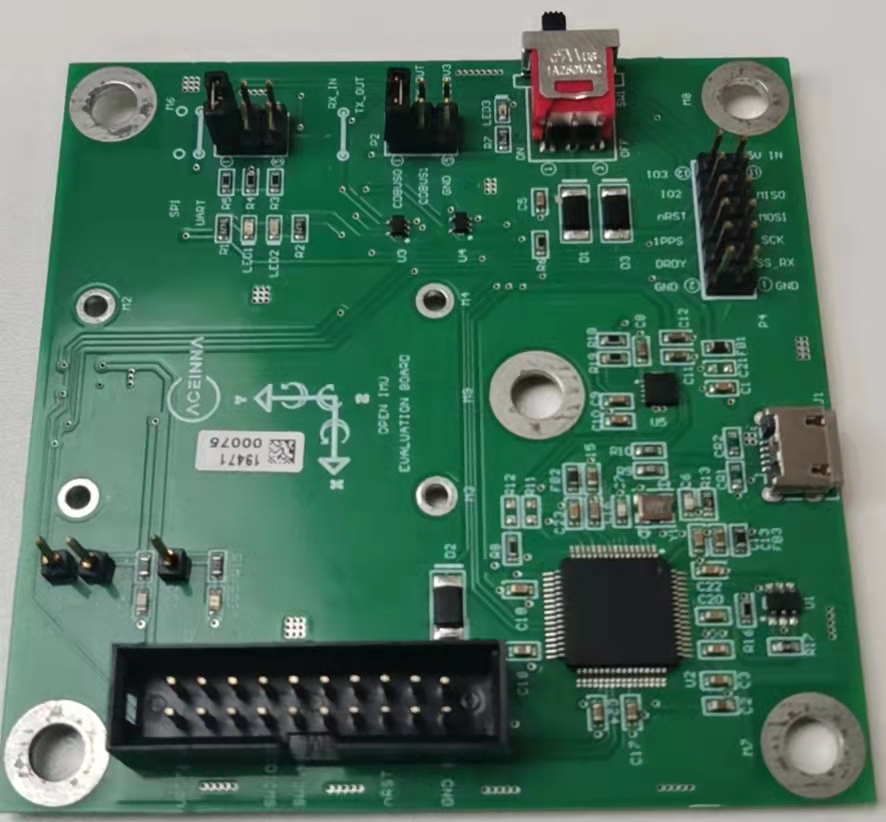
@luken I'm sorry,we never seen EVK like that.
Below is the EVK we used:
RE: openIMU300za question of hardware
posted in The OpenIMU Family •
@luken Can you tell me where you bought this product
RE: OpenIMU300BI VSCode CAN_DBC project. is it available anywhere?
posted in The OpenIMU Family •
@alex ,
CAN_DBC was old project,it was abandoned.
But as full CAN bus solutions we have OpenIMU300RI project examples – INS, VG, IMU. The code structure is slightly different,but I'm sure you can make your project based on these examples