I have a 300RI (not the development kit). Can I flash programs onto it from the RS232 interface? or is that restricted only to the development kit and ST-link.
Is it possible to flash programs onto the 300RI?

You can flash binary images via serial port using python driver bootloader.py. To get detailed instructions please provide FW version of unit you have.
Hi vatche.donikian, The 300RI have bootloader, you could downloader via uart directly. BTW, what kinds of application you are planning to integrate with 300RI?
Thanks for the responses. I plan on using the 300RI for an autonmous vehicle using CAN communication. The data sheet says I can get position, velocity, and heading information using open source algorithms. Can someone explain how this can be done? As for the FW version, I'm not sure exactly where to find that information.
@vatche-donikian Hi, the firmware could be download from https://developers.aceinna.com/code/apps

flash the INS app in link supplied by Li yifan, and then refer to INS quick start in our online doc:
https://openimu.readthedocs.io/en/latest/apps/ins.html#gps-ins-app

I am currently using firmeware version OpenIMU300RI 5020-3309-01 1.0.24 . Also, I can connect and see data in Nav-View, and I can connect to the windows server and it identifies my COM port and device, but I cannot connect to the navigation studio with my device. Any suggestions?
@vatche-donikian What's your meaning about the navigation studio? Is the https://developers.aceinna.com/devices/record-next ?
Could you show me a photo how you connect the 300RI? thanks.
@Li-YiFan here is my setup:
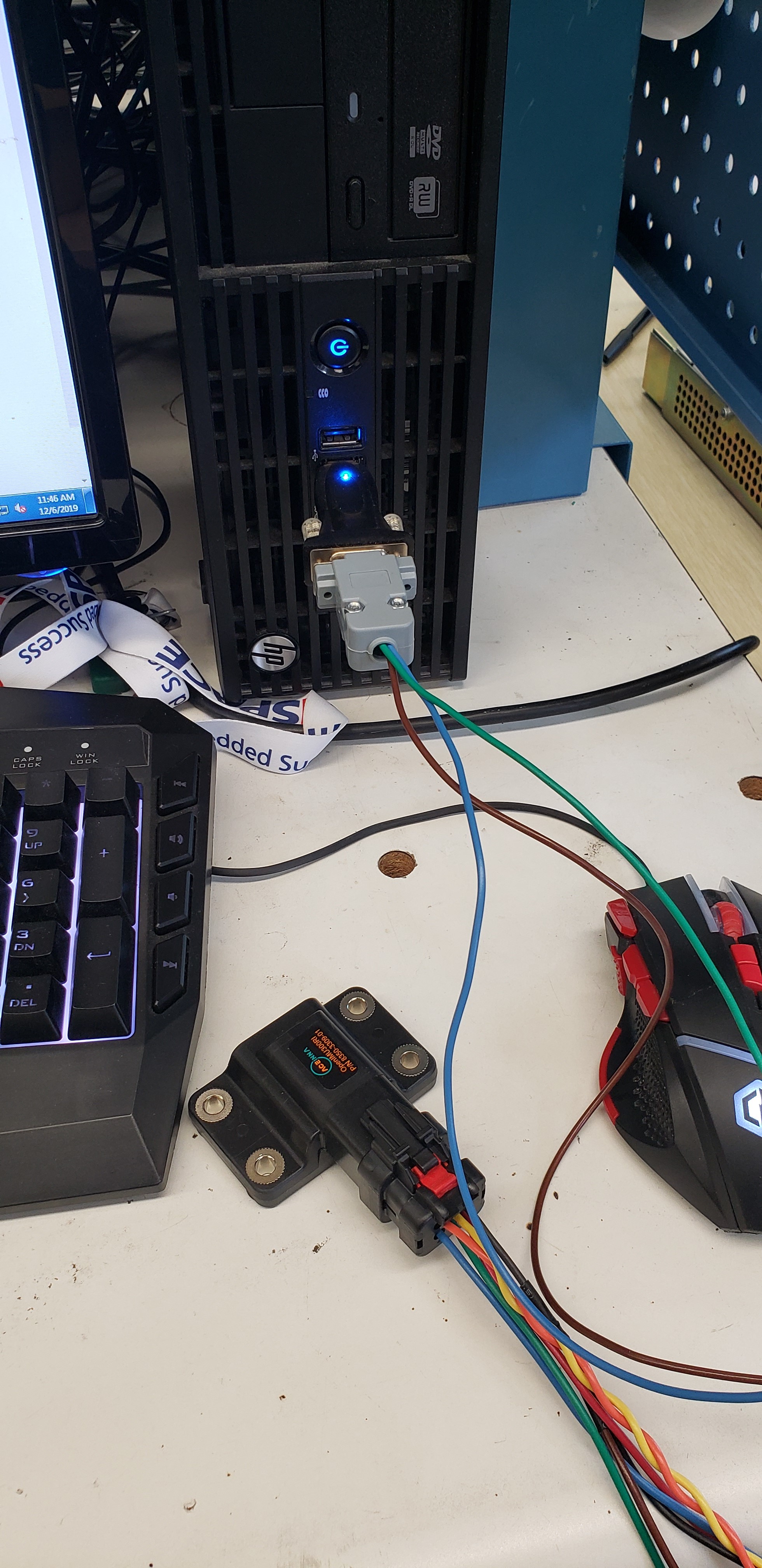
I have the CAN bus wires going to a separate db9 but have not connected them yet. I am using a 12 volt digital power supply.
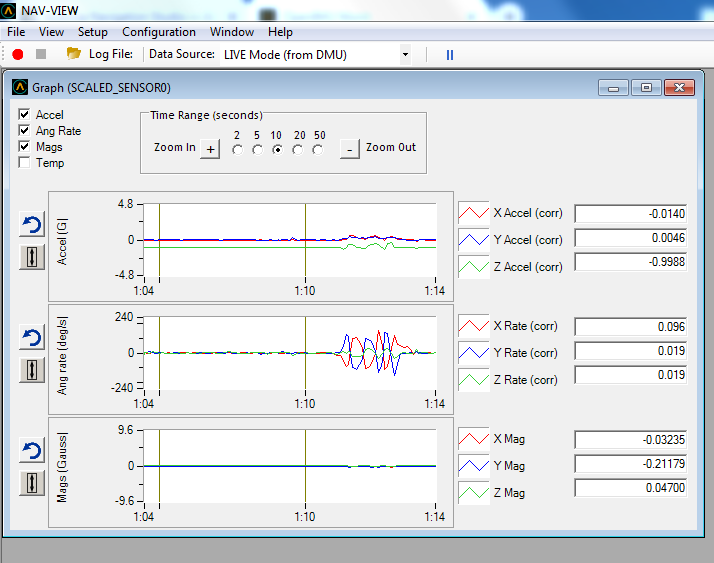
In Nav-view, I can connect and see my data as below:
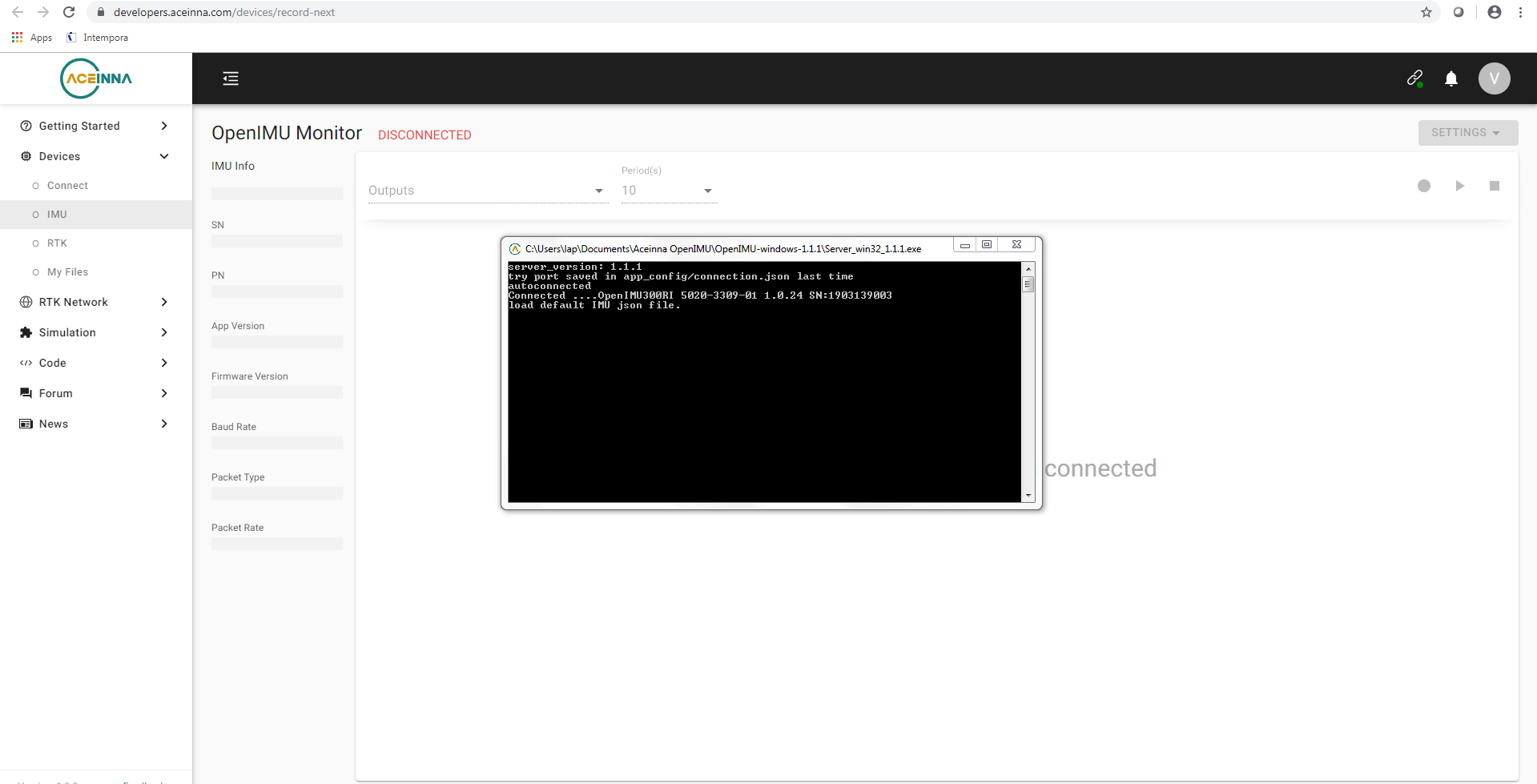
However, I cannot see any data at the link you provided, even though it says I am connected, like below:
@vatche-donikian Hi,The firmware version 0.24 is official released, and could output data from nav-view. If you need firmware support the python driver, you should upgrade the firmware to 1.1.0 5020-3309-01_OpenIMU300RI_1.1.0.bin.zip , and lock the calibrate sector in memory.
- How to upgrade the firmware:
nav-view(factory version as attached)->configuration->upgrade firmware.
https://navview.blob.core.windows.net/web-resources/internalNavViewSetup_factory_version.rar?_t=1575861782441
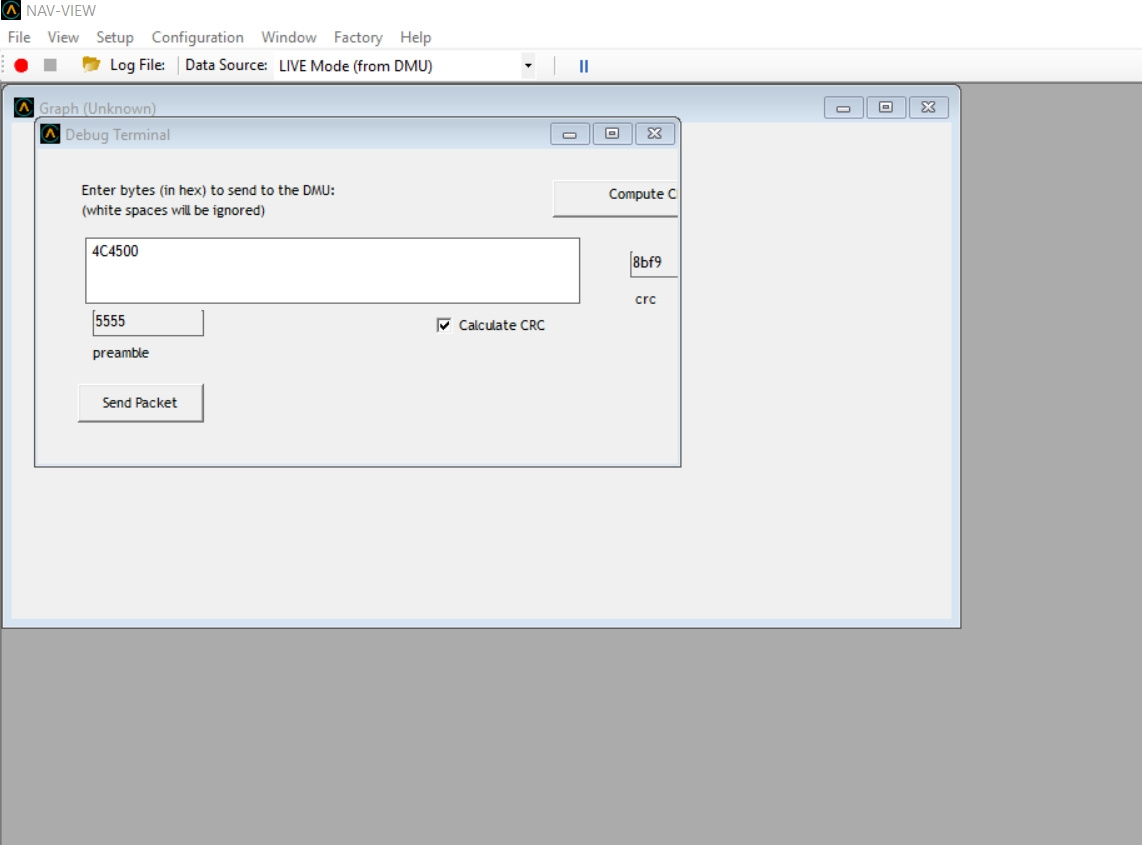
2.How to lock the sector
send the command(4C4500) in the link below with CRC data.(please try send command several times)
@Li-YiFan Thank you, I will give this a shot. Can you explain why I have to lock the 'calibrate sector' ?
Also, I am not able to view any CAN messages when I hook up my CAN connector to a viewing software like PCAN View. Could you tell me how to do this?
@vatche-donikian Hi, vatche-donikian, in firmware, if the calibrate sector is locked will be a switch that could connect with python driver via uart. If you just want to get the CAN message ourput. The 1.1.0 firmare update and calibarte sector lock is not necessary. You could get the CAN msg output from OpenIMU300RI, please refer to document as following:
https://openimu.readthedocs.io/en/latest/
https://forum.aceinna.com/topic/68/mtlt305d-connected-to-canedge2-data-loggers/2
https://github.com/Aceinna/python-mtlt
1.confirm whether 300RI is working or not? generally, it is working well if NAV-VIEW can connected successfully. green in status

2.confirm your CAN cables connection is right, High to high, low to low, and 120 resistor is needed if only 2 CAN nodes in CAN network.
refer to the link(https://forum.aceinna.com/topic/68/mtlt305d-connected-to-canedge2-data-loggers/2) mentioned above by Li Yifan.
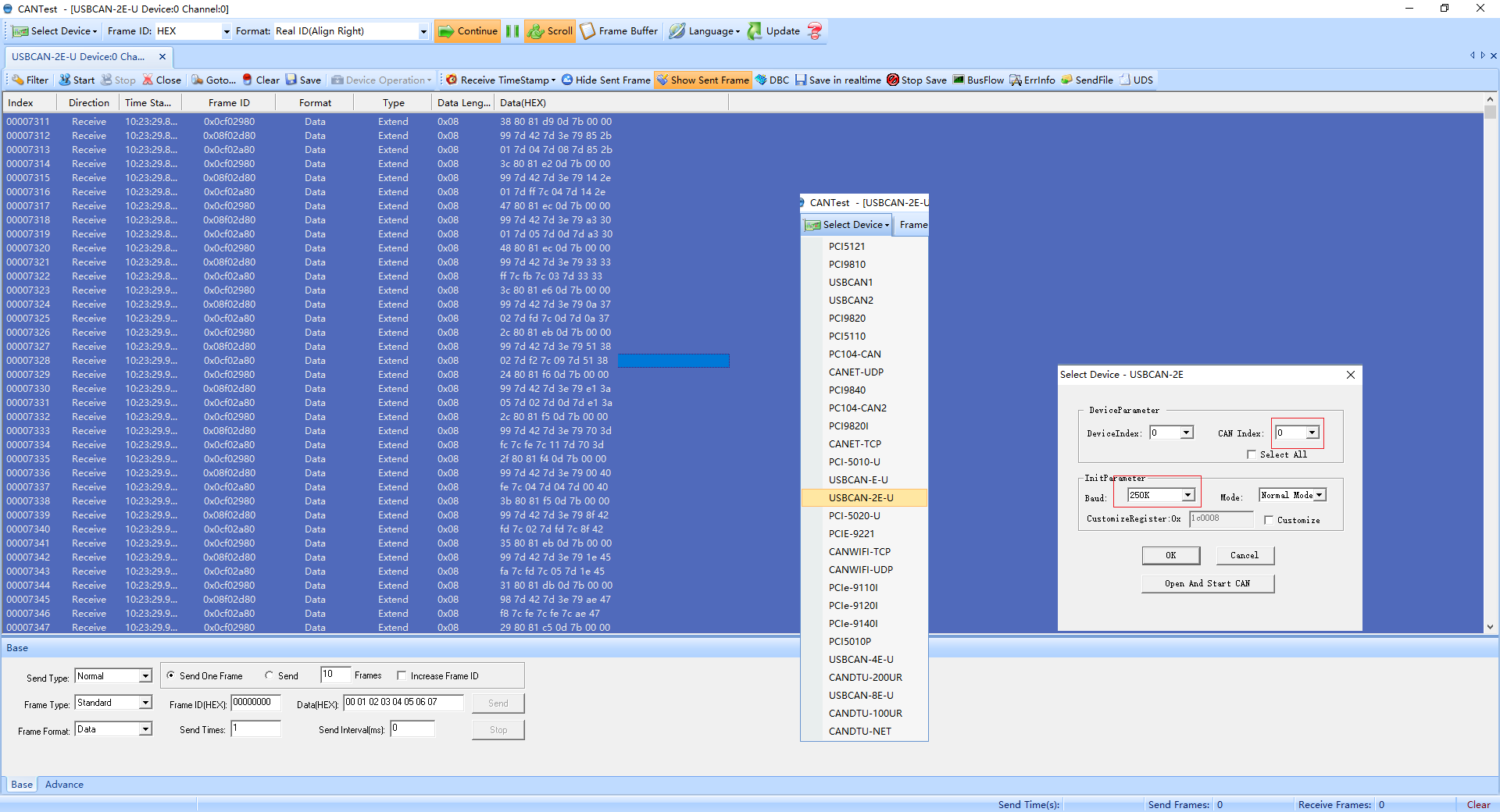
3.confirm your configurations on PCAN view is right. 250kb, right channel, right device.
for my can tool(CANTest), i have to configure as below:
@Li-YiFan and everyone else, hi sorry for the super delayed response. But we are able to get our CAN messages on 250 kbit/s in PCAN-View. Using the dbc file for the MTLT we can see the information translated as well. I have 2 further questions:
-
I'm confused if I can download the INS application, as in the comments above one person says to download it but someone else says it is not available for the 300RI yet. Could you clarify if I should try it or not?
-
For the current application I have on my IMU (I have not flashed anything yet), using the MTLT dbc file, I can get many signals, including Roll and Pitch. However, I cannot find the Yaw signal in the same way. Is there a reason why roll and pitch are available but not yaw?
hey @Li-YiFan I was wondering if there was any update to @vatche-donikian post. I am trying to calculate speed directly from my 300RI so I was hoping to be able to do so after updating to the new INS as well but seeing that some folks were not able to connect after updating I have been a little leery to try.

Hi Aceinna team, I am wondering if you have any updates that pertain to getting Yaw as asked by @vatche-donikian ?